M Series AC Servo
User Manual
112
Rev. 1.0
7/31/2019
400-820-9661
7.5.1.2 Basic Conguration
Point Counts: Select the number of position points. For M series servo drives, there are four selections:
7. 15. 31. 63number of position points.
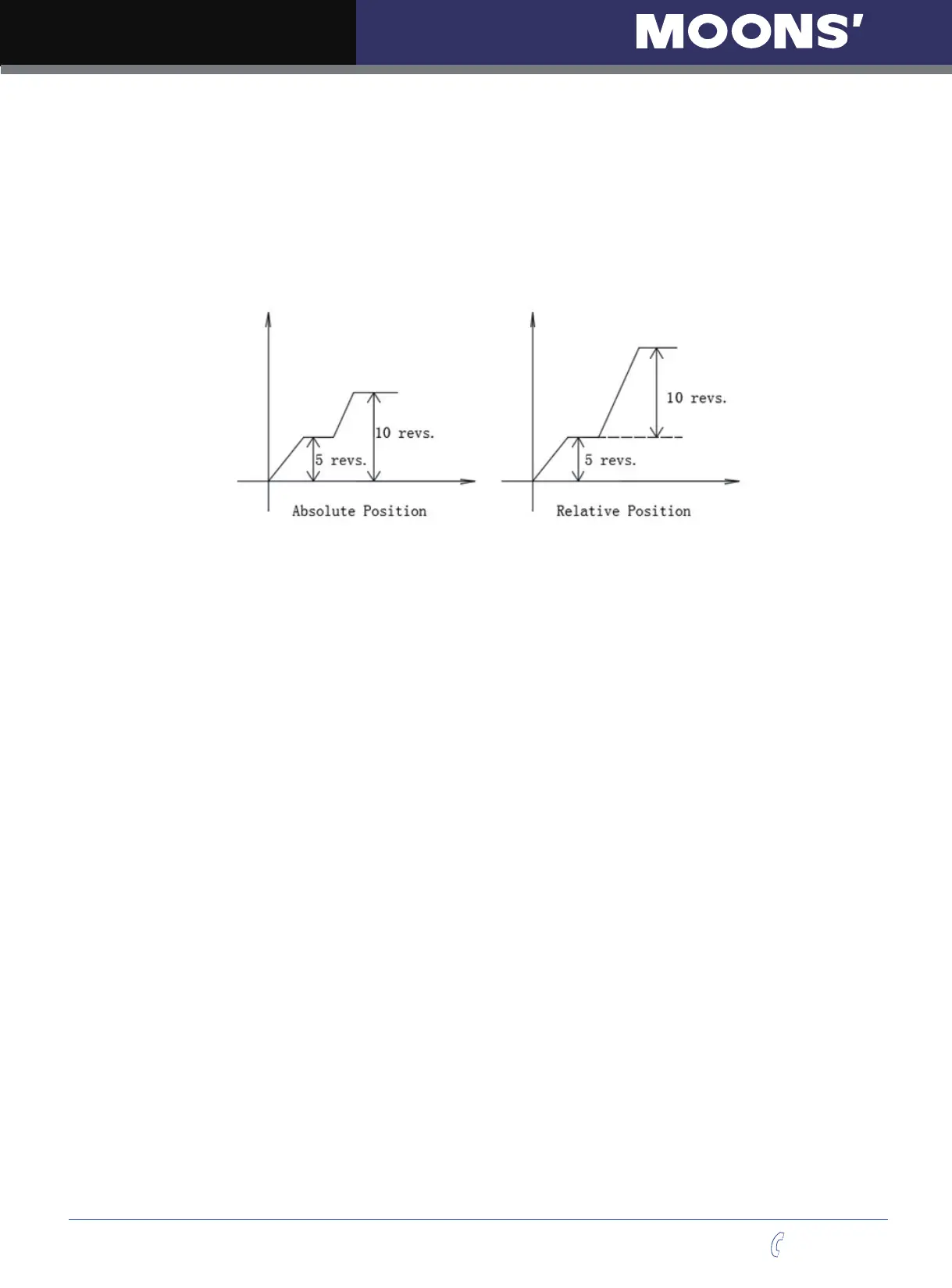
Position type: There are two types for point-to-point motion: Relative position; and absolutepositon.
Example shown in Figure 7.5.5Relative position VS Absolute positon:
Set P1position for 5revs, P2 position for 10revs, the difference between Relative position and absolute
position are as shown in below:
Figure 7.5.5Relative position VS Absolute positon
Position Unit Set position point Units.
Counts: It represents the number pulse from encoder output. For position table mode, one motor
revolution is 10000 pulse counts.
Lead: It represents the distance for one motor revolution. Unit mm/rev.
7.5.1.3 Homing settings:
Homing Method: There are 12 types to homing available.
Search homing: This feature sets the velocity, acceleration and deceleration for search homing switch.
Search Index: This feature sets the velocity, acceleration and deceleration for search motor encoder
index signal after the homing switch is reached.
Homing Offset: After homing process is finished, this sets the offset value from the homing position.