M Series AC Servo
User Manual
88
Rev. 1.0
7/31/2019
400-820-9661
If no electronic greasing is used, the valuation will be as follows:
Since the screw distance is 3mm, i.e. when motor rotate one rev, the working load will move 3mm. if
moving distance 4mm is required, it is 4/3 of rev
Pulse Count Requirement
If motor per rev requires 10000 pulse, then
= 13333.33333…
pulses
It will leads to infinite number with accumulative error in pulse number.
If use electronic gearing ratio
If 1 pulse is set to 1um, and 10000 pulse per rev, the Electronic gearing ratio can be set as follows:
If Electronic gearing ratio is set to , then 1 pulse send by the host, will leads to 1um movment on the
moving object.
Parameters Setting
Parameter Name Data Range Default
P-39 (EG)
Required pulse per
rev
200~51200 10000 Set Required pulse per rev
P-40 (PV)
Secondary Required
pulse per rev
200~51200 10000
Set secondary Required pulse per
rev
P-41 (EN)
Electronic gearing
Ratio Numerator
1~1000 1000
Set Electronic gearing Ratio
Numerator
P-42 (EU)
Electronic gearing
Ratio Denominator
1~1000 1000
Set Electronic gearing Ratio
Denominator
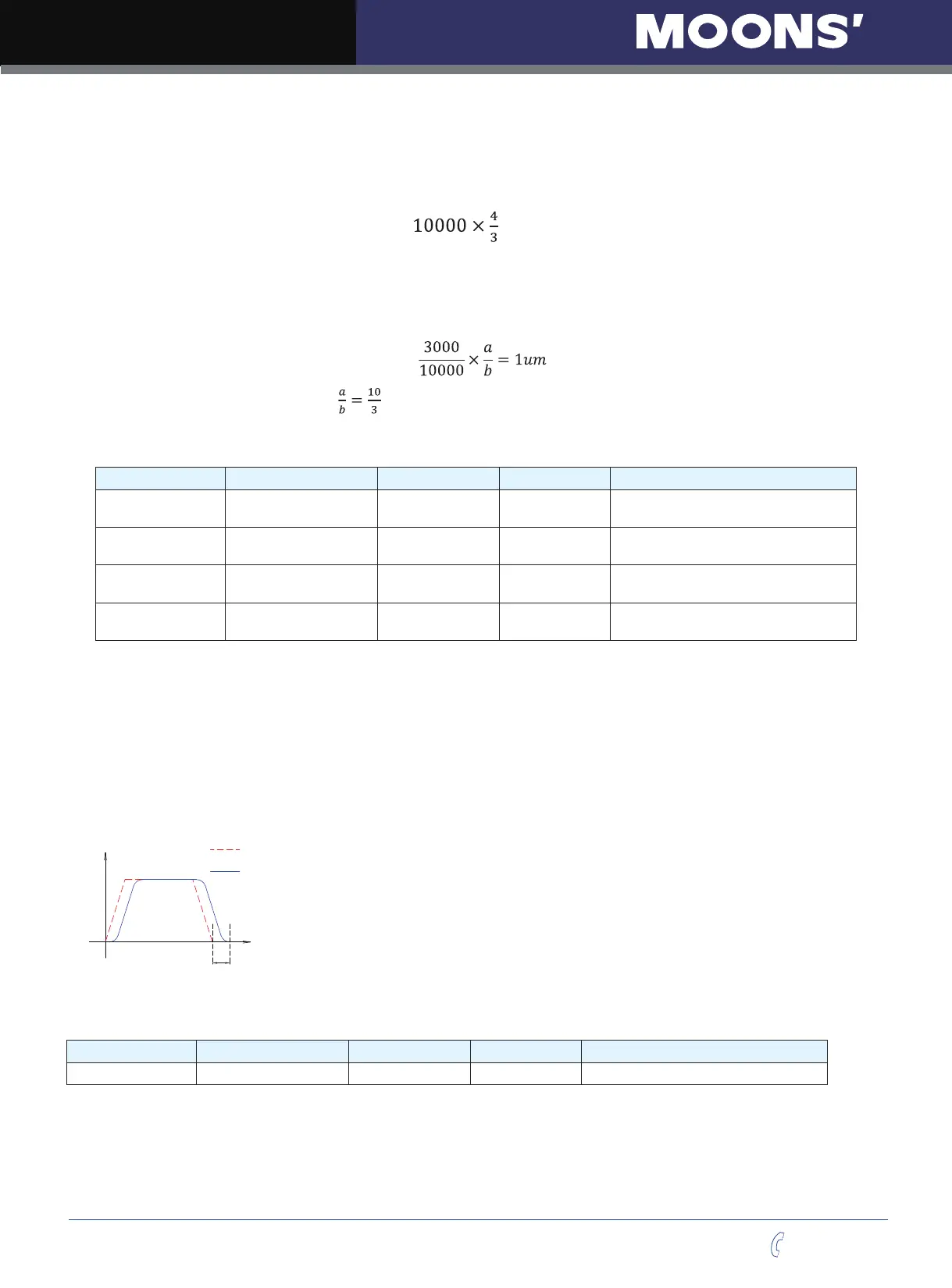
7.2.6 Jerk Smoothing Filter
Applying dynamic lter on speed and direction signals can signicantly smoothing motor rotary motion,
and reduce damages towards mechanical layer.
Jerk smoothing filter effects are as follows :
Instruction
Time
Target Curve
Actual Curve
T
1) The smaller value of P-07 (KJ), the strong effect it will be.
2) Jerk smoothing lter will cause command delay time T, but it will not effect
in position accuracy.
Parameters Setting
Parameter Name Data Range Default
P-07 (KJ) Jerk Filter Frequency 0~5000 5000 Set jerk smoothing filter parameter
NOTE: Setting to 0, means no filter effect.