M Series AC Servo
User Manual
118
Rev. 1.0
7/31/2019
400-820-9661
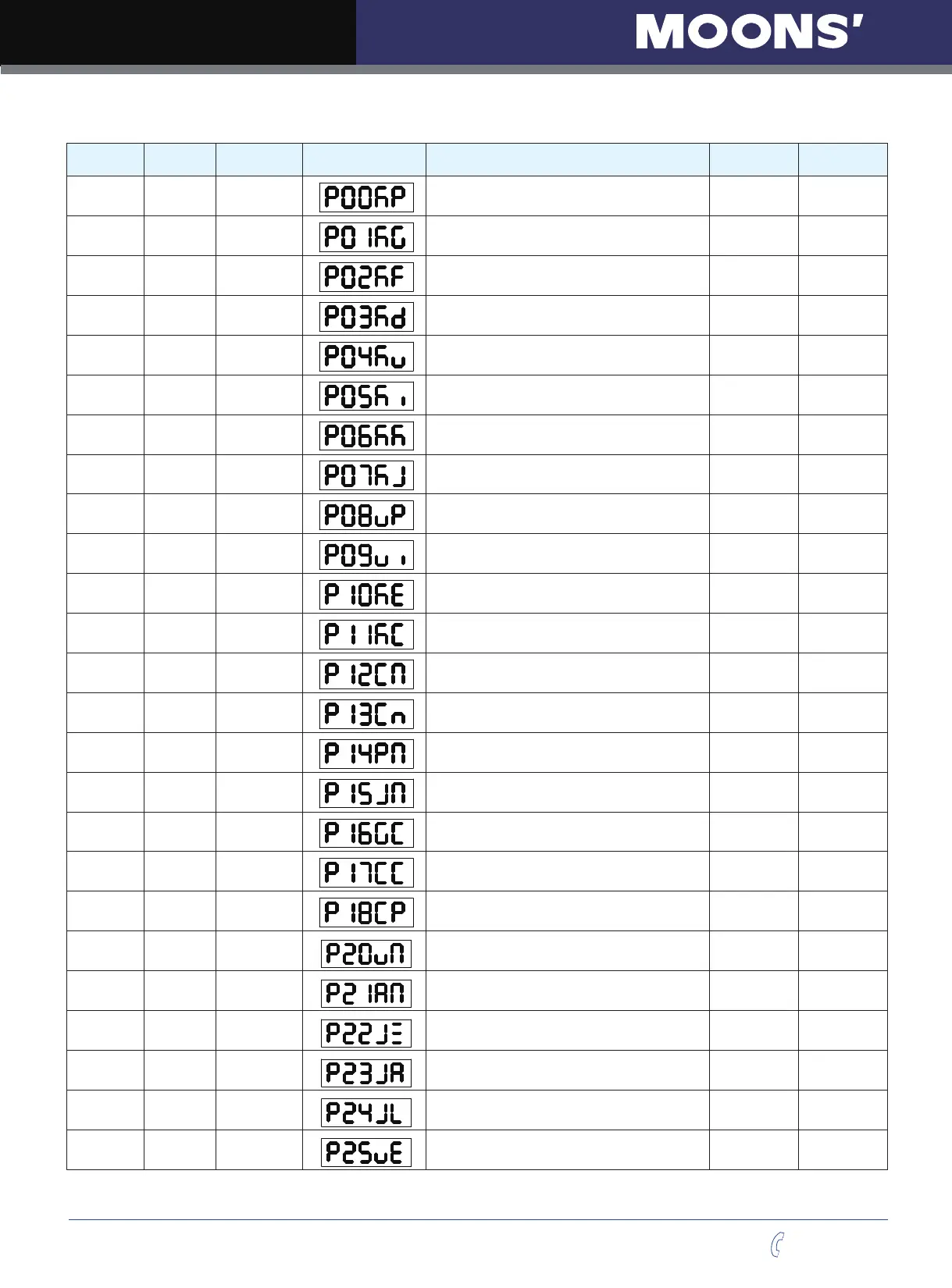
8.2 Parameter List
parameter
number
Type
SCL
command
LED display Function
Default
value
Unit
P00 PID KP
Global gain 1 10000
P01 PID KG
Global gain 2 12000
P02 PID KF
Proportion gain 6000
P03 PID KD
Deriv gain 2500
P04 PID KV
Damping gain 8000
P05 PID KI
Integrator gain 500
P06 PID KK
Inertia Feedforward Constant 800
P07 PID KJ
Jerk Filter Frequency 5000
P08 PID VP
Velocity Loop Proportional Gain 15000
P09 PID VI
Velocity Loop Integral Gain 600
P10 PID KE
Deriv Filter factor 15000
P11 PID KC
PID Filter factor 25000
P12
Control
mode
CM
Main control mode 7
P13
Control
mode
CN
Secondary control mode 21
P14
Control
mode
PM
Power-up mode 2
P15
Control
mode
JM
Jog mode 1
P16
Current
config
GC
Current Command of Torque Mode 0 0.01A
P17
Current
config
CC
Rated Maximum current 0.5 * A
P18
Current
config
CP
Peak current 1.5 * A
P20 Profile VM
Maximum velocity 60.000 rps
P21 Profile AM
Maximum acceleration/deceleration 3000 rps/s
P22 Profile JS
Jog speed 10.000 rps
P23 Profile JA
Jog acceleration 100.00 rps/s
P24 Profile JL
Jog deceleration 100 rps/s
P25 Profile VE
Point to point Velocity 5 rps