M Series AC Servo
User Manual
154
Rev. 1.0
7/31/2019
400-820-9661
9.3.7 Command Opcode description
Register 40125 is defined as command Opcode, when following command is entered into register, the
drive will execute the corresponding operation.
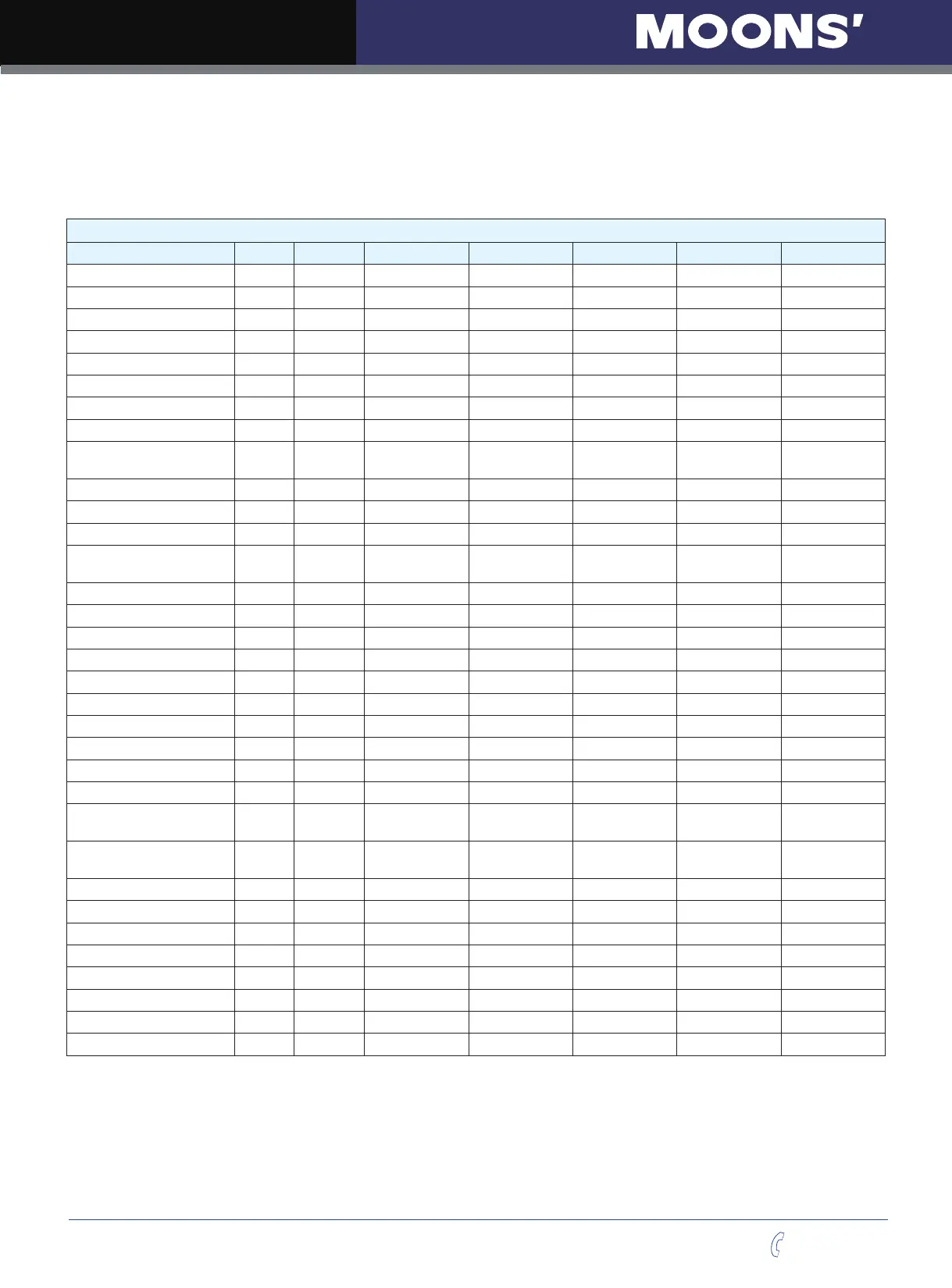
1) SCL Command Encoding Table
SCL Command Encoding Table
Function SCL Opcode Parameter 1 Parameter 2 Parameter 3 Parameter 4 Parameter 5
Alarm Reset AX 0xBA
× × × × ×
Start Jogging CJ 0x96
× × × × ×
Stop Jogging SJ 0xD8
× × × × ×
Encoder Function EF 0xD6 0,1,2 or 6
× × × ×
Encoder Position EP 0x98 Position
× × × ×
Feed to Double Sensor FD 0x69 I/O Point 1 Condition 1 I/O Point 2 Condition 2
×
Follow Encoder FE 0xCC I/O Point Condition
× × ×
Feed to Length FL 0x66
× × × × ×
Feed to Sensor with Mask
Distance
FM 0x6A I/O Point Condition
× × ×
Feed and Set Output FO 0x68 I/O Point Condition
× × ×
Feed to Position FP 0x67
× × × × ×
Feed to Sensor FS 0x6B I/O Point Condition
× × ×
Feed to Sensor with
Safety Distance
FY 0x6C I/O Point Condition
× × ×
Jog Disable JD 0xA3
× × × × ×
Jog Enable JE 0xA2
× × × × ×
Motor Disable MD 0x9E
× × × × ×
Motor Enable ME 0x9F
× × × × ×
Seek Home SH 0x6E I/O Point Condition
× × ×
Set Position SP 0xA5 Position
× × × ×
Filter Input FI 0xC0 I/O Point Filter Time
× × ×
Filter Select Inputs FX 0xD3
× × × × ×
Step Filter Freq SF 0x06 Freq
× × × ×
Analog Deadband AD 0xD2 0.001 V
× × × ×
Alarm Reset Input AI 0x46
Function
('1'..'3')
I/O Point
× × ×
Alarm Output AO 0x47
Function
('1'..'3')
I/O Point
× × ×
Analog Scaling AS 0xD1
× × × × ×
Define Limits DL 0x42 1..3
× × × ×
Set Output SO 0x8B I/O Point Condition
× × ×
Wait for Input WI 0x70
× × × × ×
Queue Load & Execute QX 0x78 1..12
× × × ×
Wait Time WT 0x6F 0.01 sec
× × × ×
Stop Move, Kill Buffer SK 0xE1
× × × × ×
Stop Move, Kill Buffer SKD 0xE2
× × × × ×
For more detailed command functions description, please refer to Host Command Reference manual.