M Series AC Servo
User Manual
161
Rev. 1.0
7/31/2019
400-820-9661
9.3.9.2 JOG mode
1. JOG mode required parameters:
SCL
command
Target
Value
Unit Dec Dec (Hex) Description
AC 100 rps/s 40047 600 (258h)
The unit for register 40028 is
rps
2
, when target
acceleration is 100rps/s, the value will be 600
JL 200 rps/s 40048 1200 (258h)
The unit for register 40029 is
rps
2
. When target
deceleration is 200rps/s, the value will be 1200
JS 10 rps 40049 2400 (960)
The unit for register 40030 is
. When target velocity
is 200rps/s, the value will be 1200
2. Drive Setting
Parameter Function
P-75 (PR) = 5 Big-endian data transfer
P-76 (TD) = 10 Feedback delay 10ms
P-77 (BR) = 3 Communication baud rate 38400bps
P-78 (DA) = 1 Communication address 1
P-14 (PM) = 8 Power up mode as modbus/rtu
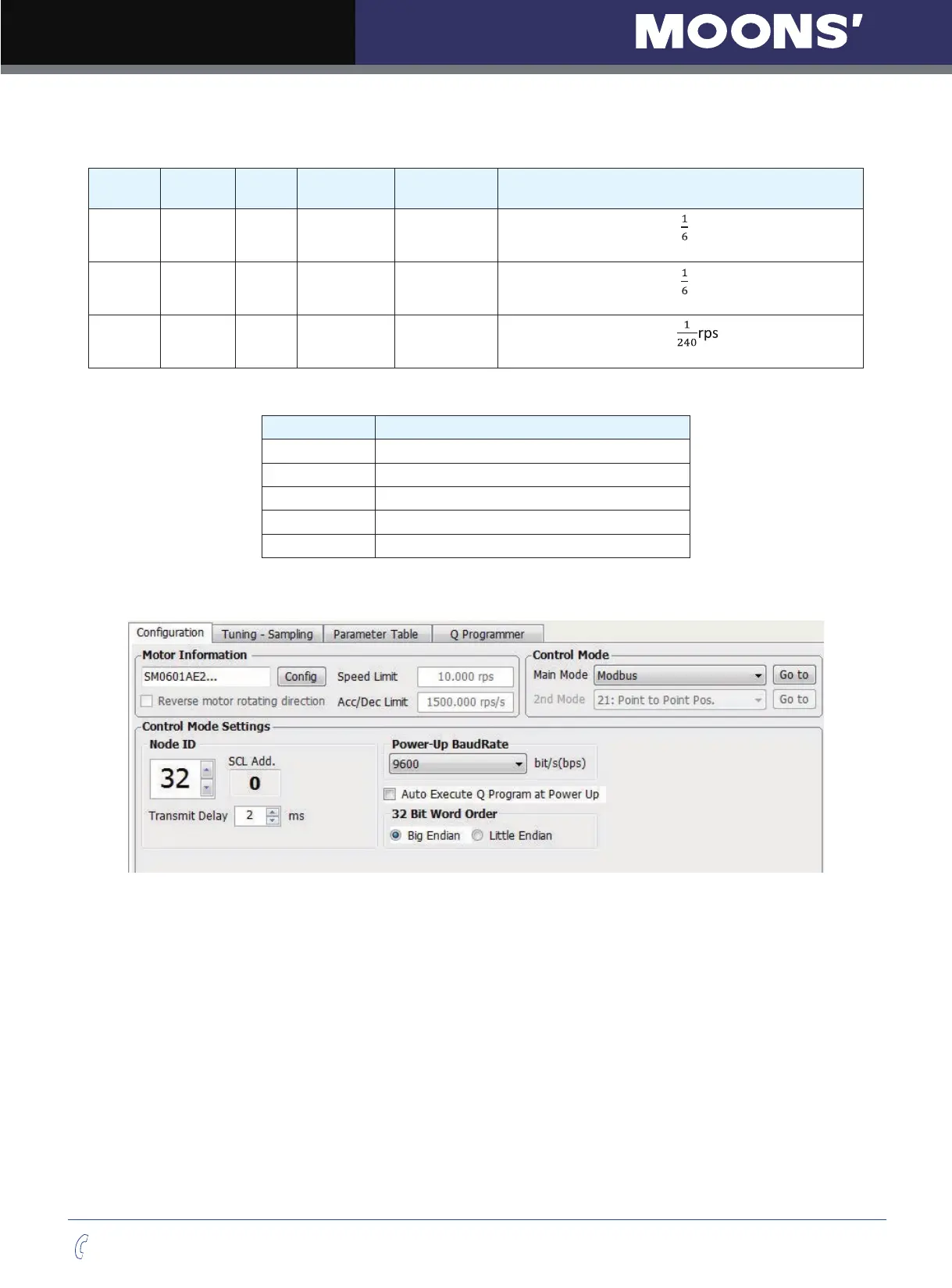
Use M servo suite software for configurations: