M Series AC Servo
User Manual
114
Rev. 1.0
7/31/2019
400-820-9661
M0(X7) ~ M5(X12)status:
’
0
’
means input is closed;
’
1
’
means input is Open.
After the homing process, motor will move to corresponding position which selected by input M0(X7) ~
M5(X12), and triggered by X4 (position trigger)when it changesfrom
‘
open
’
to
‘
close
’
.
5) Click
‘
OK
’
to finish linear mode settings
6) Click
‘
Download to Drive
’
the set the drive
7) Close the software turn off the power, and restart both drive and software for running position table
mode.
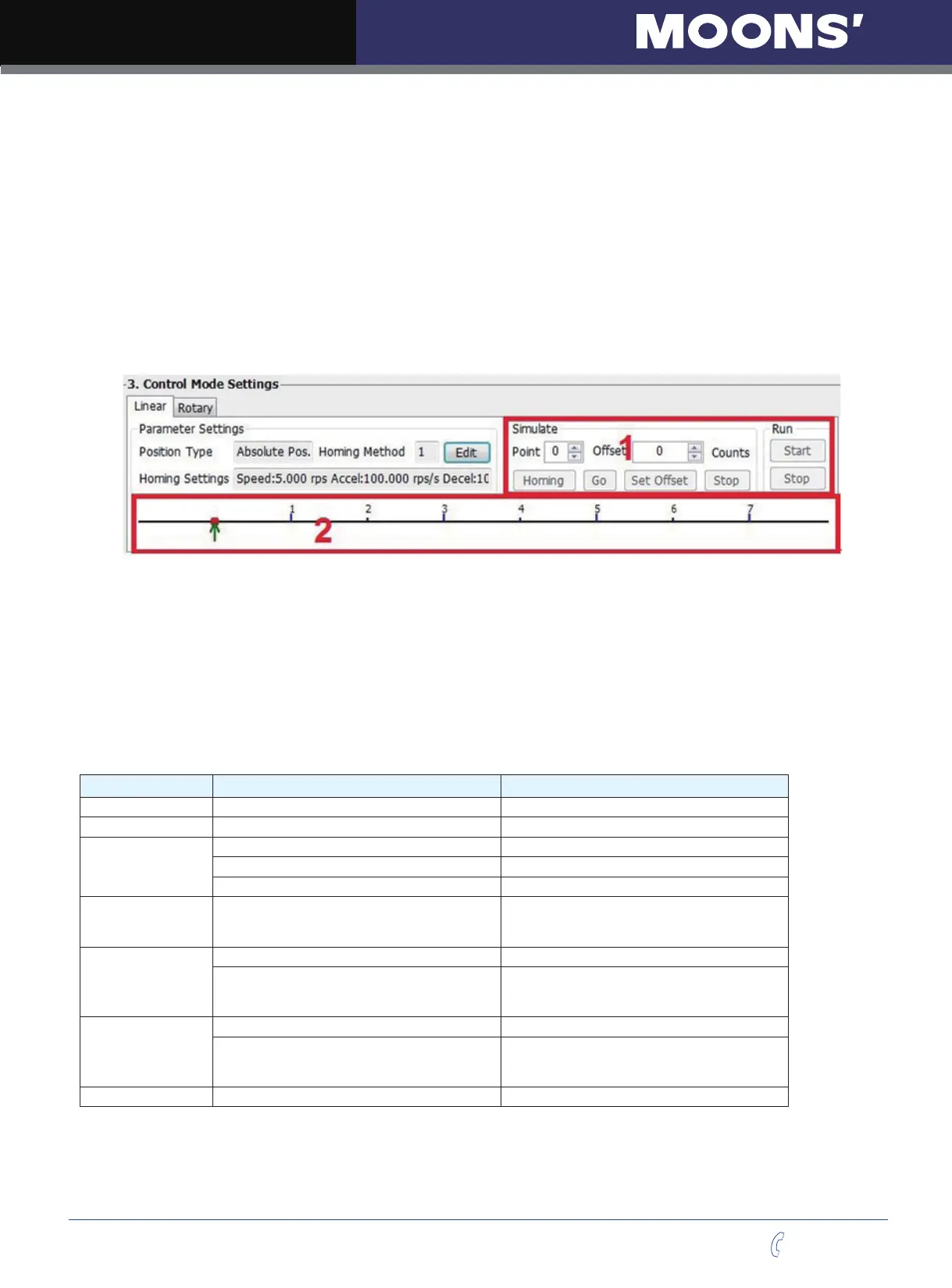
7.5.1.6 Simulate
After the configurationprocess, simulate function can verify the settings simulate the motions.
Figure 7.5.8Linear motion Simulate
Homing: Click
‘
homing
’
to start homing process.
Go: Set the position point by changing the value in point box, and click
‘
go
’
button to start the motion. In
Figure 7.5.8Linear motion Simulate, green arrow in box ② shows the load position in real time.
Set Offset: Confirm offset position, change this value will change the position in position table
Stop: Stop current motion immediately
7.5.1.7 Linear motion input denition
Input Function Description
X1 Homing Sensor Homing sensor switch
X2 Homing Trigger Triggering homing process
X3
General Purpose Generalpurpose
Servo On When Closed Enable the motor drive when input closed
Servo On When Open Enable the motor drive when input open
X4 PositionTrigger
It is a trigger signal. When Input X4 changes
from open to close, motor will move to the
position selected by switch M0(X7) ~ M5(X12)
X5
General Purpose Generalpurpose
CW Limit Sensor
Set CW position limit, please refer to M2 user
manual chapter 7.1.3, CW/CCW limit for more
details
X6
General Purpose Generalpurpose
CCW Limit Sensor
Set CCW position limit, please refer to M2 user
manual chapter 7.1.3, CW/CCW limit for more
details
X7~X12 MInput Position point input