M Series AC Servo
User Manual
99
Rev. 1.0
7/31/2019
400-820-9661
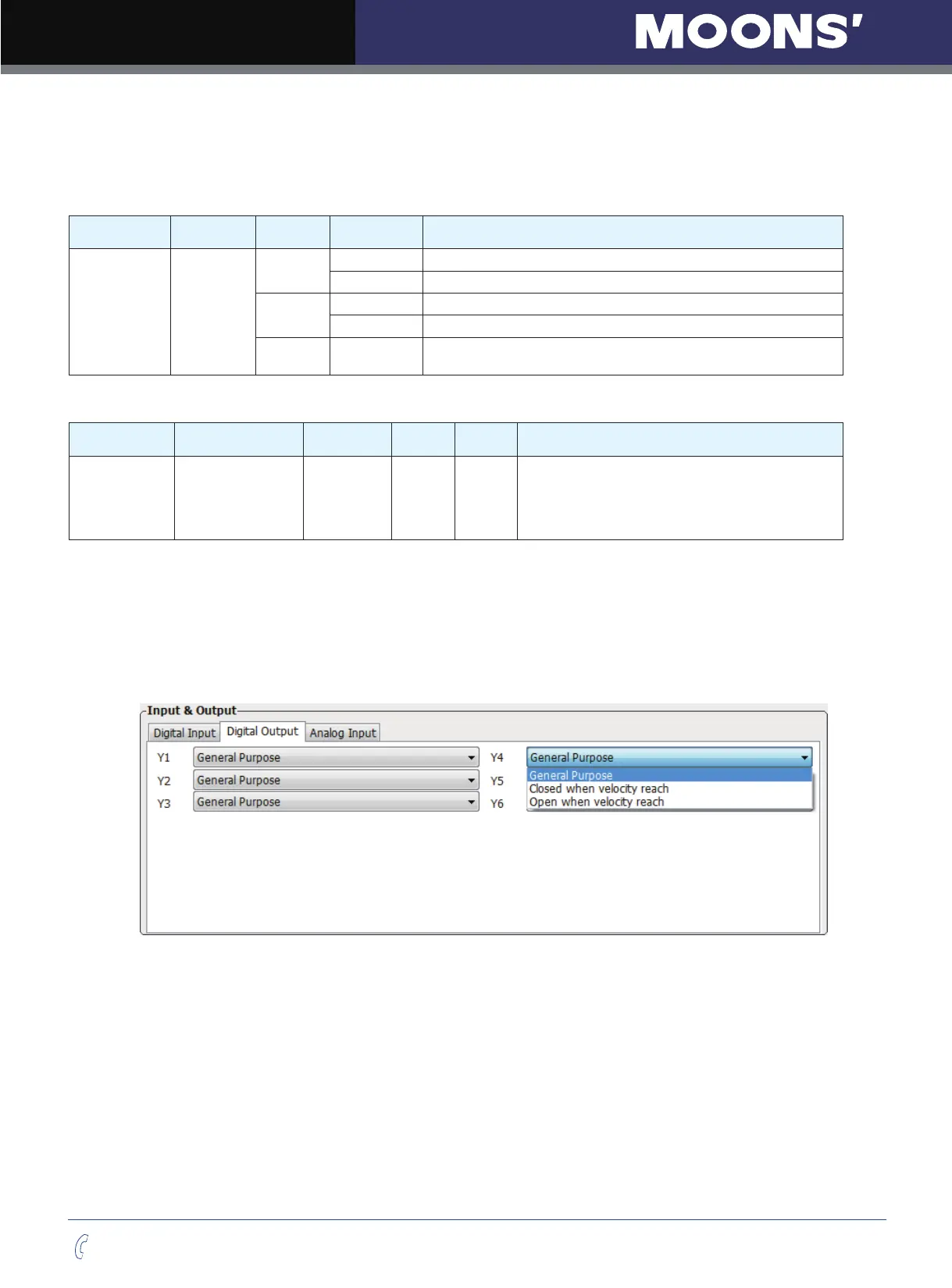
7.3.3.7 Target Velocity Reach
In velocity mode, when motor
’
s actual velocity and command velocity is the same,
“
velocity reach
”
signal
can be sent by output Y4 .
The second digit (from right to left) of parameter P-68 (MO) defines the output signal Y4.
Signal Name PIN
P-68
(MO)
Condition Function
Y4
Y4 (43)
OUT- (33)
□□
B
□
Closed Closed means target speed not reached
Open Open means reach output speed
□□
A
□
Closed Close means reach output speed
Open Open means target speed not reached
□□
3
□
(default)
General purpose signal, function disabled.
Parameters Setting
Parameter Name Data Range
Default
value
Unit Description
P-85 (VR)
Ripple range
setting for velocity
reach
0~136 0.000 Rps
The velocity ripple value around the targeted
velocity. If the difference between the actual
velocity and targeted velocity is within the ripple
value. The driver will then define actual torque
meets its target torque value.
NOTE: if you need to view or set this value on drive
’
s control panel (P-83 (VR), please refer to
following calculation:
Velocity ripple range = LED display value x 240
Unit for Velocity ripple range is revolution per second (rps)
Setting Via Software