M Series AC Servo
User Manual
160
Rev. 1.0
7/31/2019
400-820-9661
Second Step: Point To Point Motion Command
Chapter 9.3.7 command Opode describes register 40125
’
s control code. From the SCL code list shows
that for point to point position motion, it requires to write data 0x66 to register 40125.
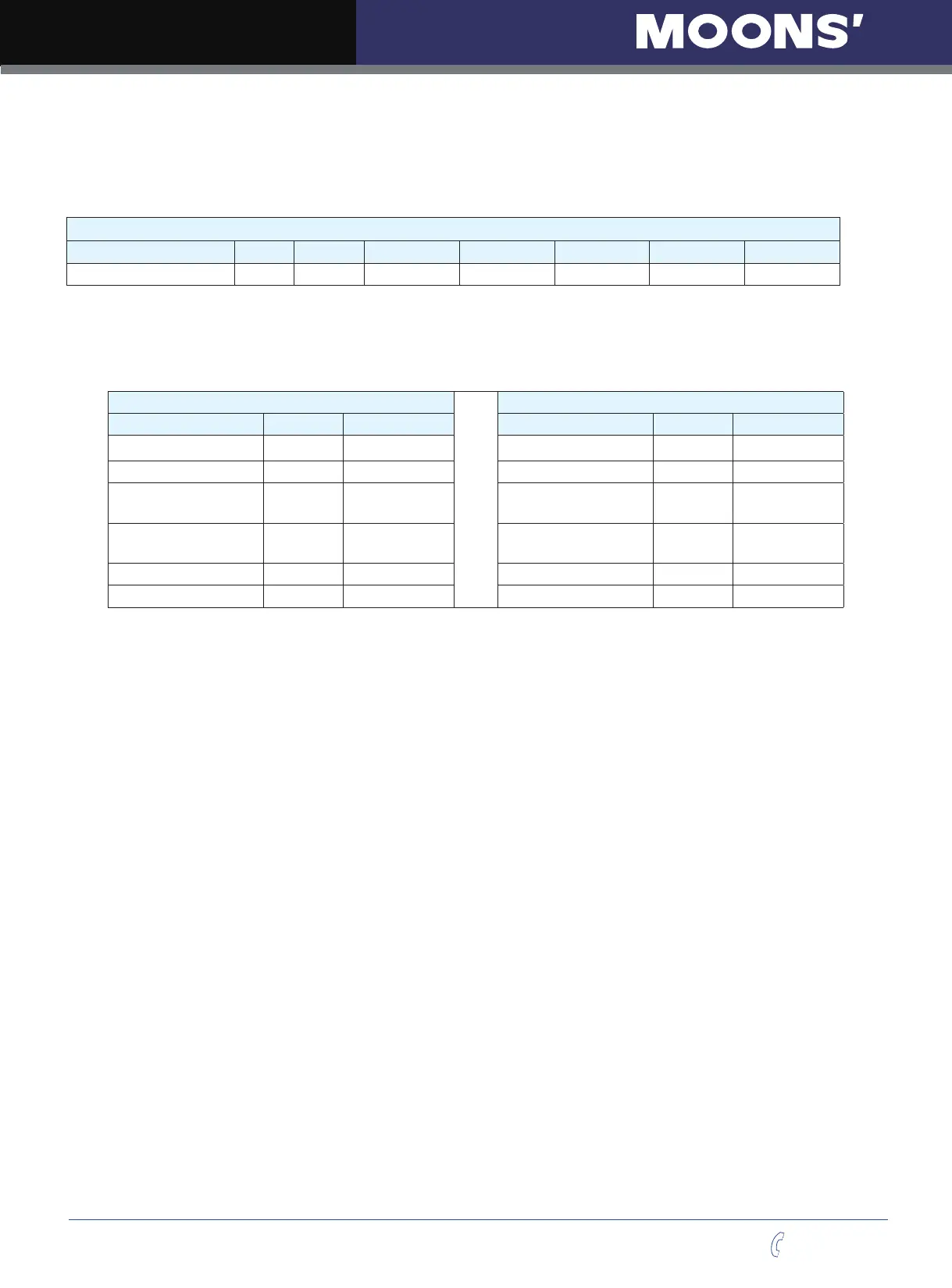
SCL Command Encoding Table
Function SCL Opcode Parameter 1 Parameter 2 Parameter 3 Parameter 4 Parameter 5
Feed to Length FL 0x66
× × × × ×
Host Sending: 01 06 00 7C 00 66 C8 38
Drive Reply: 01 06 00 7C 00 66 C8 38
Listed As Below:
Command Message (Master) Command Message (Slave)
Function Data Number Of Bytes Function Data Number Of Bytes
Slave Address 01H 1 Slave Address 01H 1
Function Code 06H 1 Function Code 06H 1
Starting Data Address
00H (High)
7CH (Low)
2 Starting Data Address
00H (High)
7CH (Low)
2
Content of Data
00 (High)
66 (Low)
2 Content of Data
00 (High)
66 (Low)
2
CRC Check Low C8 1 CRC Check Low C8 1
CRC Check High 38 1 CRC Check High 38 1