Programming Your Application 1-75
690+ Series Frequency Inverter
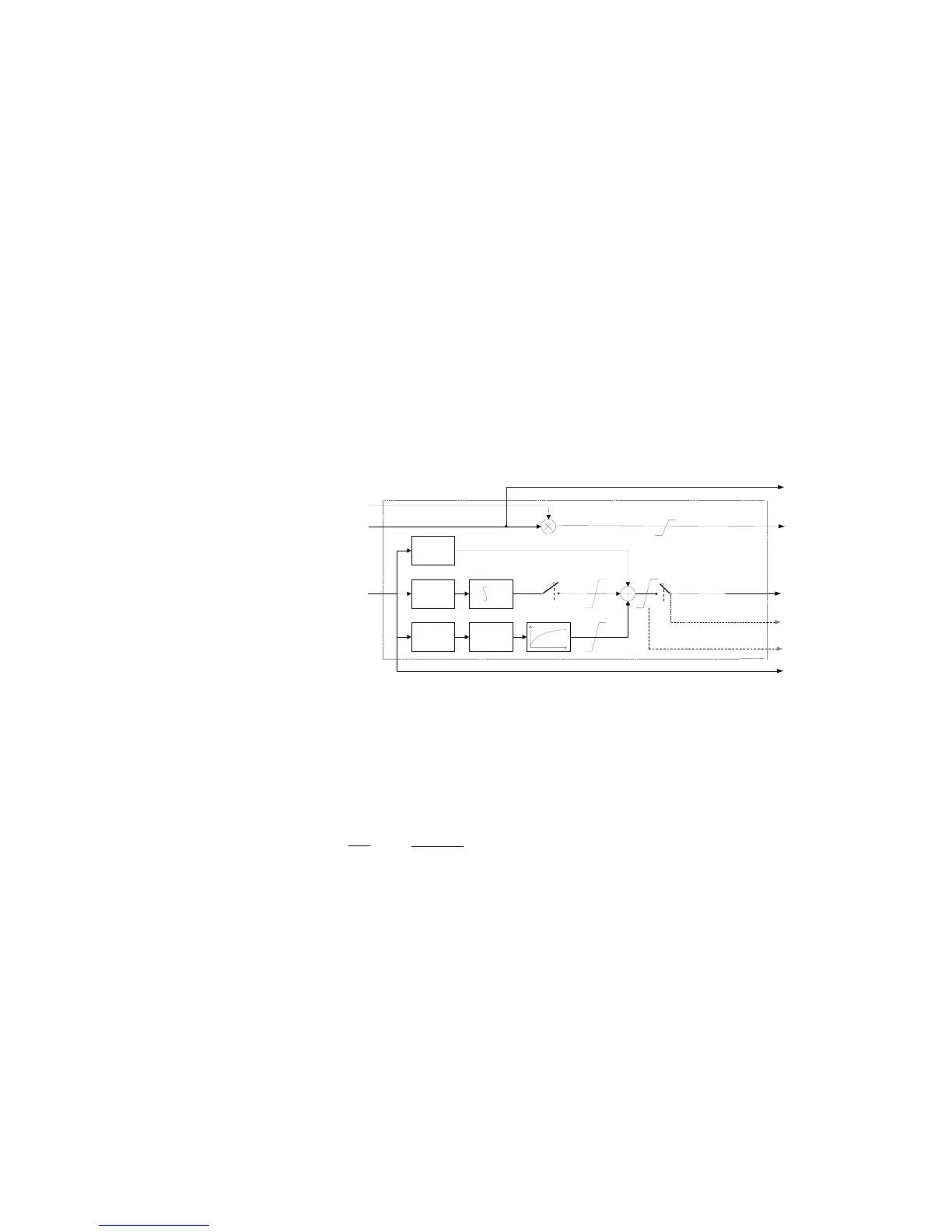
Functional Description
P gain
I gain
dt
D gain
d / dt
feed forward
error
phase input
feed forward gain
P gain
limit
limit
limit
limiting
enable
PID output
feed foward
output
speed loop
error
(internal connection)
(internal connection)
int defeat
+300.00
-300.00
• Functions as P, PI, PD and PID with filtering.
• Single symetric limit on output.
PID Stage
The formula which describes the action of the PID in the ‘S’ domain is as follows:
PID = K
P
+ K
i
+ K
D
S
S
F
1 + S T
where: K
P
is the proportional gain
K
i
is the integral gain
K
D
is the derivative gain
T
F
is the filter time constant
Parameter Descriptions
I GAIN
Range: 0.00 to 100.00
The integral gain of the PHASE PID block.
D GAIN
Range: 0.00 to 100.00
The derivative gain of the PHASE PID block.
D FILTER TC
Range: 0.00 to 10.00 s
In order to help attenuate high frequency noise on the derivative term, a first order lag has been
provided. This parameter determines the filter time constant.
LIMIT
Range: 0.00 to 300.00%
This parameter determines the maximum positive and negative excursion (Limit) of the PID
output.

 Loading...
Loading...








