1-74 Programming Your Application
690+ Series Frequency Inverter
PHASE PID
This function block is an alternative, simplified
version of the process PID controller and is
dedicated to phase control.
The PID correction, PID OUTPUT, is internally
connected to PHASE INPUT in the SPEED
LOOP function block.
MMI Menu Map
1
SETUP
2
SYSTEM BOARD
3
PHASE PID
ERROR unused
FEED FWD unused
FEED FWD GAIN
P GAIN
INT DEFEAT
I GAIN
D GAIN
LIMIT
ENABLE PID
D FILTER TC
OUTPUT
PID OUTPUT
LIMITING
ERROR
FEED FWD
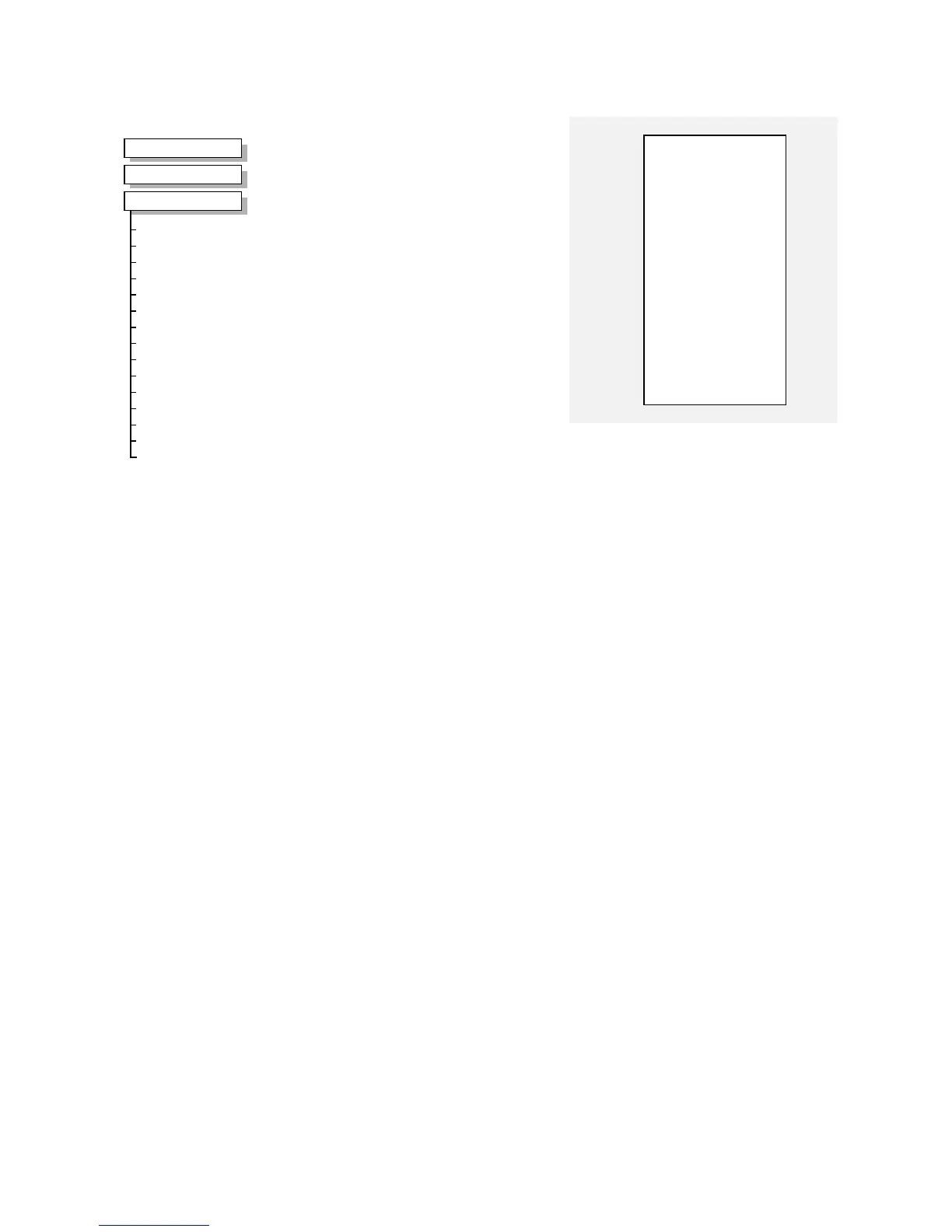
Phase PID
OUTPUT [1522]
–
0.00 %
PID OUTPUT [1549]
–
0.00 %
LIMITING [1523]
–
FALSE
ERROR [1679]
–
0.00%
FEED FWD [1680]
–
0.00%
FALSE
–
[1520] ENABLE
–
0.00 % – [1513] ERROR unused
–
0.00%
–
[1514] FEED FWD unused
–
1.00
–
[1515] FEED FWD GAIN
–
10.00
–
[1516] P GAIN
–
FALSE
–
[1843] INT DEFEAT
–
1.00
–
[1517] I GAIN
–
0.00
–
[1518] D GAIN
–
0.05 s
–
[1521] D FILTER TC
–
300.00%
–
[1519] LIMIT
–
Parameter Descriptions
OUTPUT
Range: __.xx%
Output of the PHASE PID function block - scaled feed forward. This is a new feature for
software version 5.x and the correction is now connected directly to the PHASE INPUT
parameter in the SPEED LOOP function block.
PID OUTPUT
Range: __.xx%
Output of PID without FEED FWD.
LIMITING
Range: FALSE / TRUE
This output is TRUE if the OUTPUT is at the LIMIT value.
ERROR
Range: —.xx
This diagnostic position error is internally connected to OUTPUT in the PHASE CONTROL
function block.
FEED FWD
Range: —.xx
This diagnostic feed forward is internally connected to POS FEED FWD in the PHASE
CONTROL function block.
ENABLE PID
Range: FALSE / TRUE
This parameter globally resets the PID output and integral term when FALSE.
This parameter must be TRUE for the PID to operate.
ERROR unused
Range: -300.00 to 300.00 %
Previously used for connection to PHASE CONTROL::OUTPUT. This connection is now
made internally.
FEED FWD unused
Range: -300.00 to 300.00 %
Previously used for connection to PHASE CONTROL::POS FEED FWD. This connection is
now made internally.
FEED FWD GAIN
Range: -300.00 to 300.00
Feed forward gain of the PHASE PID block.
P GAIN
Range: 0.00 to 3000.00
The proportional gain of the PHASE PID block.
INT DEFEAT
Range: FALSE / TRUE
The PID Integral term is defeated when set to TRUE.

 Loading...
Loading...








