Programming Your Application 1-79
690+ Series Frequency Inverter
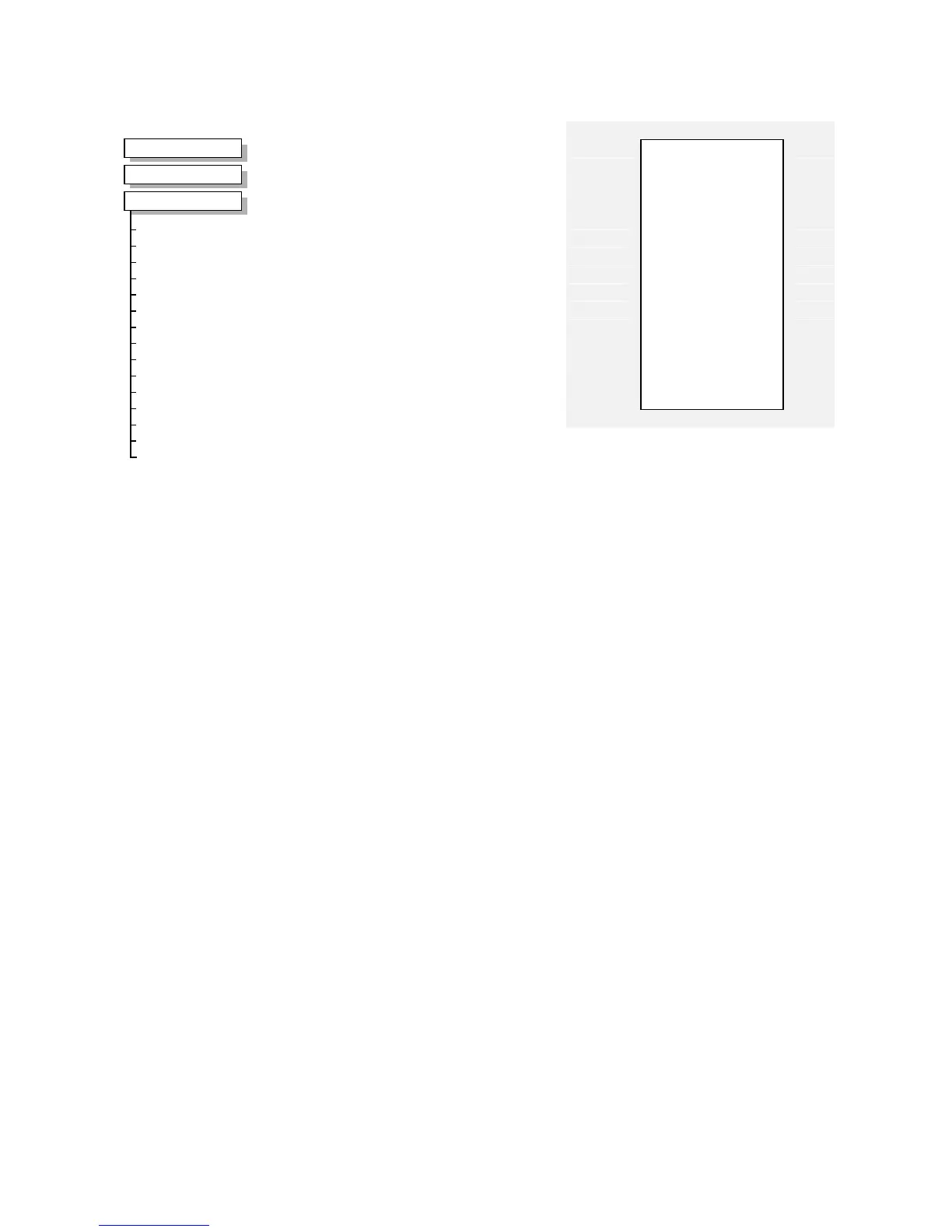
PID
This function block allows the Inverter to be
used in applications requiring a trim to the
setpoint, depending on feedback from an
external measurement device. Typically this
will be used for process control, i.e. pressure or
flow.
PID
PID OUTPUT [320]
–
0.00 %
PID ERROR [766]
–
0.00 %
0.00 % – [310] SETPOINT
–
0.00%
–
[764] FEEDBACK
–
FALSE
–
[763] SETPOINT NEGATE
–
FALSE
–
[765] FEEDBACK NEGATE
–
FALSE
–
[311] ENABLE
–
FALSE
–
[312] INTEGRAL DEFEAT
–
1.0
–
[313] P GAIN
–
1.00 s
–
[314] I TIME CONST
–
0.000 s
–
[315] D TIME CONST
–
0.100 s
–
[316] FILTER TC
–
100.00 %
–
[317] OUTPUT POS LIMIT
–
-100.00 %
–
[318] OUTPUT NEG LIMIT
–
1.0000
–
[319] OUTPUT SCALING
–
MMI Menu Map
1
SETUP
2
SETPOINT FUNCS
3
PID
SETPOINT
FEEDBACK
SETPOINT NEGATE
FEEDBACK NEGATE
ENABLE
INTEGRAL DEFEAT
GAIN
I TIME CONSTANT
D TIME CONSTANT
FILTER TC
OUTPUT POS LIMIT
OUTPUT NEG LIMIT
OUTPUT SCALING
PID OUTPUT
PID ERROR
Parameter Descriptions
SETPOINT
Range: -300.00 to 300.00 %
An input to the PID block.
FEEDBACK
Range: -300.00 to 300.00 %
An input to the PID block.
SETPOINT NEGATE
Range: FALSE / TRUE
Changes the sign of SETPOINT.
FEEDBACK NEGATE
Range: FALSE / TRUE
Changes the sign of FEEDBACK.
ENABLE
Range: FALSE / TRUE
This parameter globally resets the PID output and integral term when FALSE.
This parameter must be TRUE for the PID to operate.
INTEGRAL DEFEAT
Range: FALSE / TRUE
This parameter resets the PID integral term when TRUE.
P GAIN
Range: 0.0 to 100.0
This parameter is the true proportional gain of the PID controller. With a P gain of zero, the
PID output would be zero.
I TIME CONST
Range: 0.01 to 100.00 s
The integral time constant of the PID controller.

 Loading...
Loading...








