160
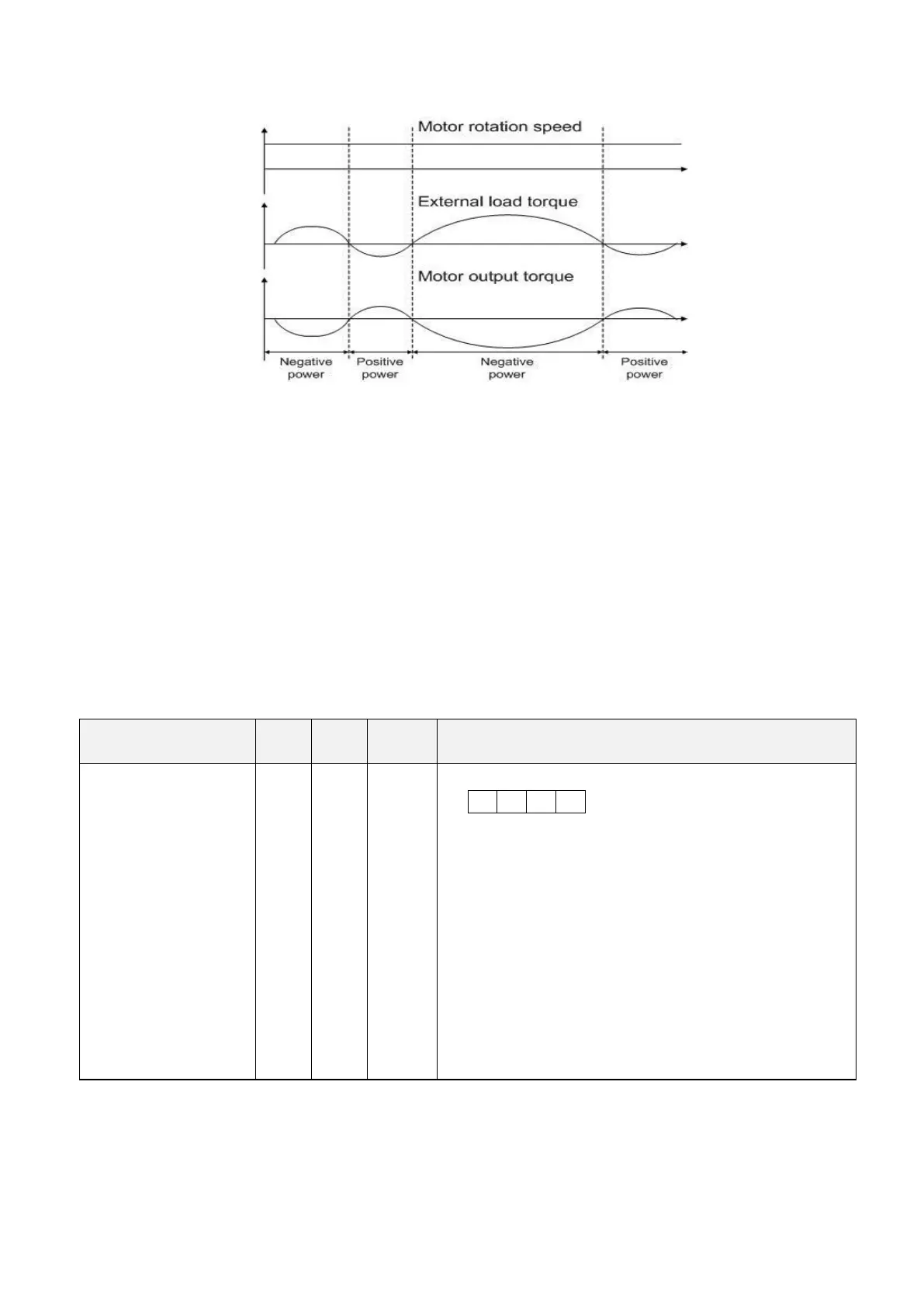
Power of the external load torque:
Where:
is the power of external load torque
is the external load torque. (Unit: Nt-m)
is the motor rotation speed. (Unit: rad/s)
For example:
If an external load torque of +50% rated torque is applied and the servo motor speed is 3000r/min, the
servo drive is 400W capacity(rated torque: 1.27Nt-m), then the users need to connect a external brake
resistor which power is 2 x (0.5 x 1.27) x (3000 x 2 x π/ 60) = 399W, 100Ω.
Note: 1rpm = 2π/60 (rad/s)
6.9.2. Analog monitor output
There are 2 analog monitor channels provided for users to check the required signals. The contents
and settings of monitor output are described in the table below.
There are 2 monitor outputs, ch1 and ch2.
The setting values and their corresponding output are
listed below.
0:Motor speed (scale: ±10V/(double rated speed))
1:Generated torque (scale: ±10V/max.torque)
2:Speed command (scale: ±10V/(double rated speed))
3:Effective load ratio (scale: ±10V/±300%)
4:Pulse command frequency (scale: ±10V/500kpps)
5:Current command (scale: ±10V/max.current command)
6:DC Bus voltage (scale: ±10V/400V)
7:Pulse command error(scale: ±10V/4194304 pulse)
8:Pulse command error(scale: ±10V/10000pulse)
9:Pulse command error(scale: ±10V/100pulse)
Example:
If the PC14 is set as 0000h and the current speed of motor is forward rotation 3000 rpm, a +5V signal
would be measured on CN1-30 and LG. On the other hand, a -5V signal would be detected if the speed
 Loading...
Loading...