81
5.3. Parameter details list
Setting value of Control mode option:
x:control mode select
0:position
1:position/speed
2:speed
3:speed/torque
4:torque
5:torque/position
y:position command select
0:external input
1:inner register(absolute type)
2:inner register(incremental type)
z:electromagnetic brake enabled option
0:disabled
1:enabled. (Motor with electromagnetic brake applied)
u:DI/DO setting option
0:Functions of DI/DO are fixed.
1:Functions of DI/DO are changed as control mode
switched.
x:gain tuning mode option
0:manual-gain tuning(PI control)
1: manual-gain tuning(PI control + interference compensator)
2: Auto-gain tuning(load inertia ratio and bandwidth estimated)
3: Auto-gain tuning(fixed load inertia ratio)
4:Interpolation mode(PB37 is fixed, other gain value estimated)
Auto-tuning response level setting:
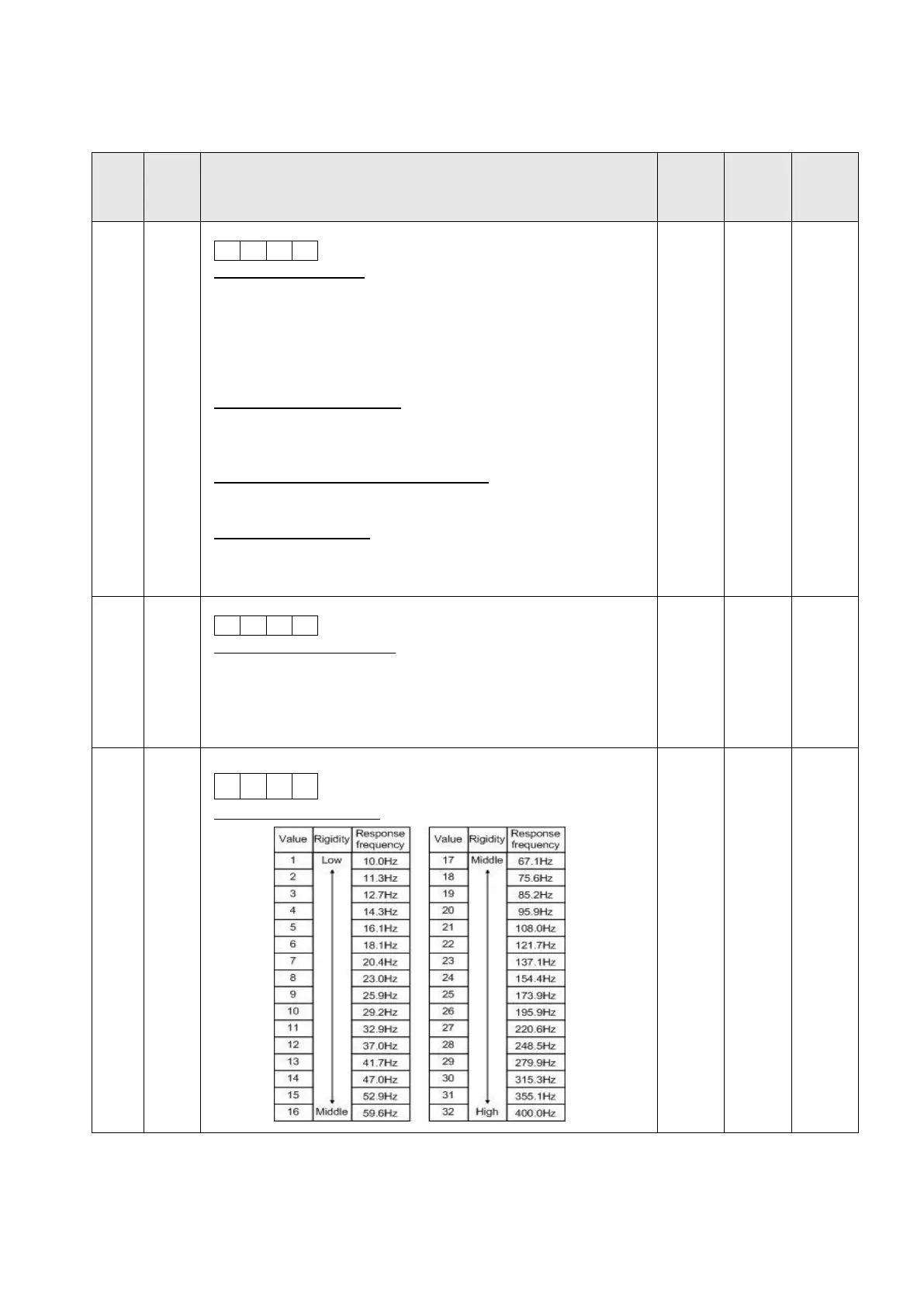 Loading...
Loading...