47
4.4. Status display
Press “MODE” key once to shift to the next display mode. Press the “UP” or “DOWN” key to
change the display data as desired. When the required data is selected, the corresponding data
appears. Press the “SET” key to display the information. A negative value which occupies 5 digits is
displayed by the 5 lit decimal points. If a negative value which occupies only 4 digits or less, the
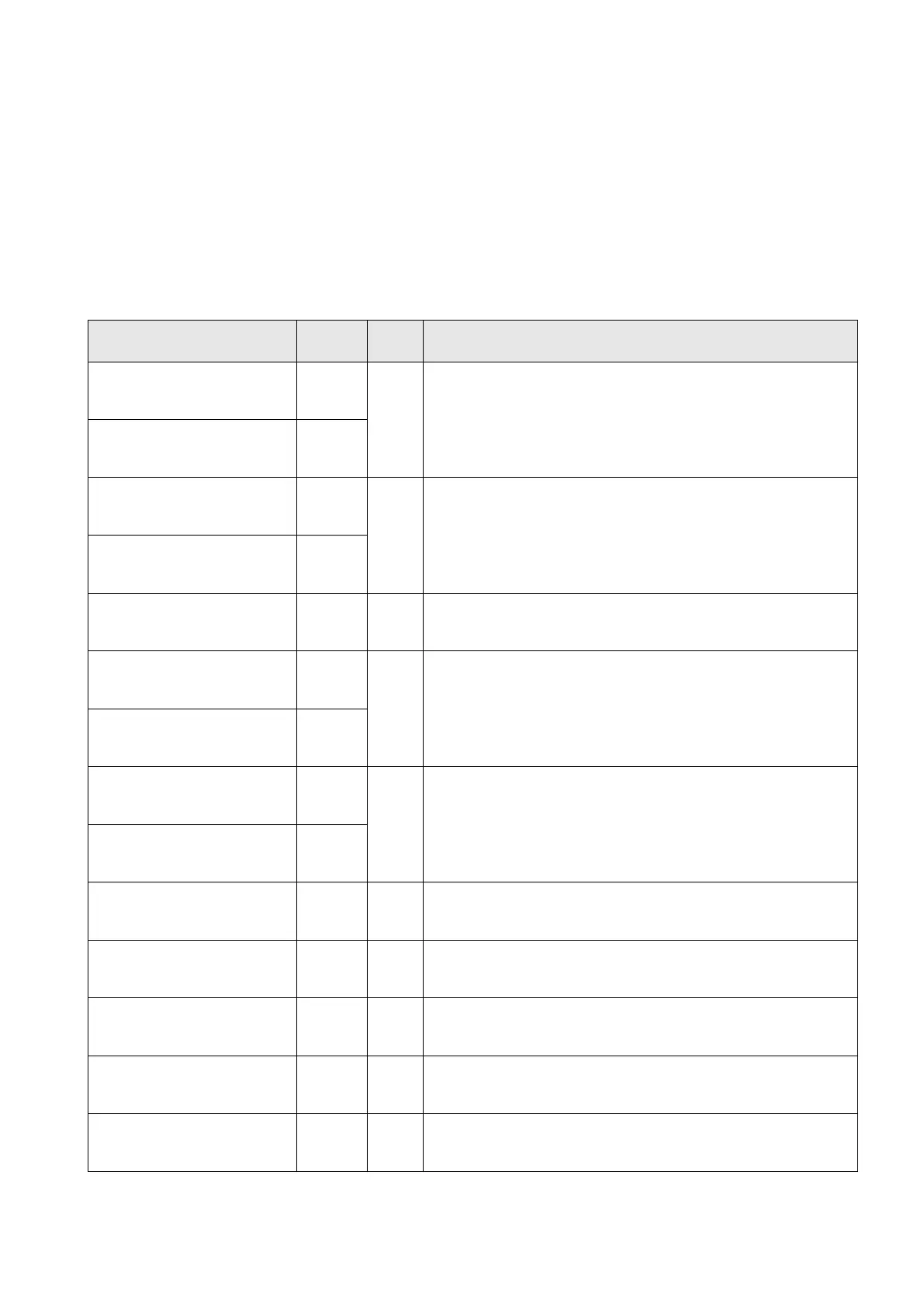
negative symbol “-“ is displayed at the highest digit. The servo statuses which may be shown are listed
in the following table:
Motor feedback pulses
(High 5-digit)
Feedback pulses from the motor encoder are counted and
displayed.
Ex: A cumulated value of motor feedback pulses 123456789,
FPHI=1234, FPLI=56789.
Motor feedback pulses
(Low 5-digit)
Command pulses
(High 5-digit)
The external command pulses are counted and displayed.
Ex: The number of droop pulses 123456789, CPHI=1234.
CPLI=56789.
Command pulses
(Low 5-digit)
Accumulative pulses error
(Low 5-digit)
The difference which only low 5-digit between command and
motor feedback pulses are shown.
Translated motor feedback
pulses (High 5-digit)
The motor feedback pulses are multiplied by the electronic
gear then displayed.
Translated motor feedback
pulses (Low 5-digit)
Translated command
pulses (High 5-digit)
The command pulses are re-counted by the electronic gear
ratio then displayed.
Translated command
pulses (Low 5-digit)
Translated accumulative
pulses error(Low 5-digit)
The difference which only low 5-digit between command and
motor feedback pulses are multiplied by the electronic gear
then are shown.
The frequency of command pulses is counted and displayed.
The current speed of servo motor is displayed.
Analog speed command
/limit voltage
Speed: It denotes the analog voltage of speed command.
Torque: It denotes the analog voltage of speed limit.
Speed input command/limit
Speed: It denotes the speed command.
Torque: It denotes the speed limit.
 Loading...
Loading...