'HWHFWLRQ'HWHFWLRQ
$XWRPDWLF
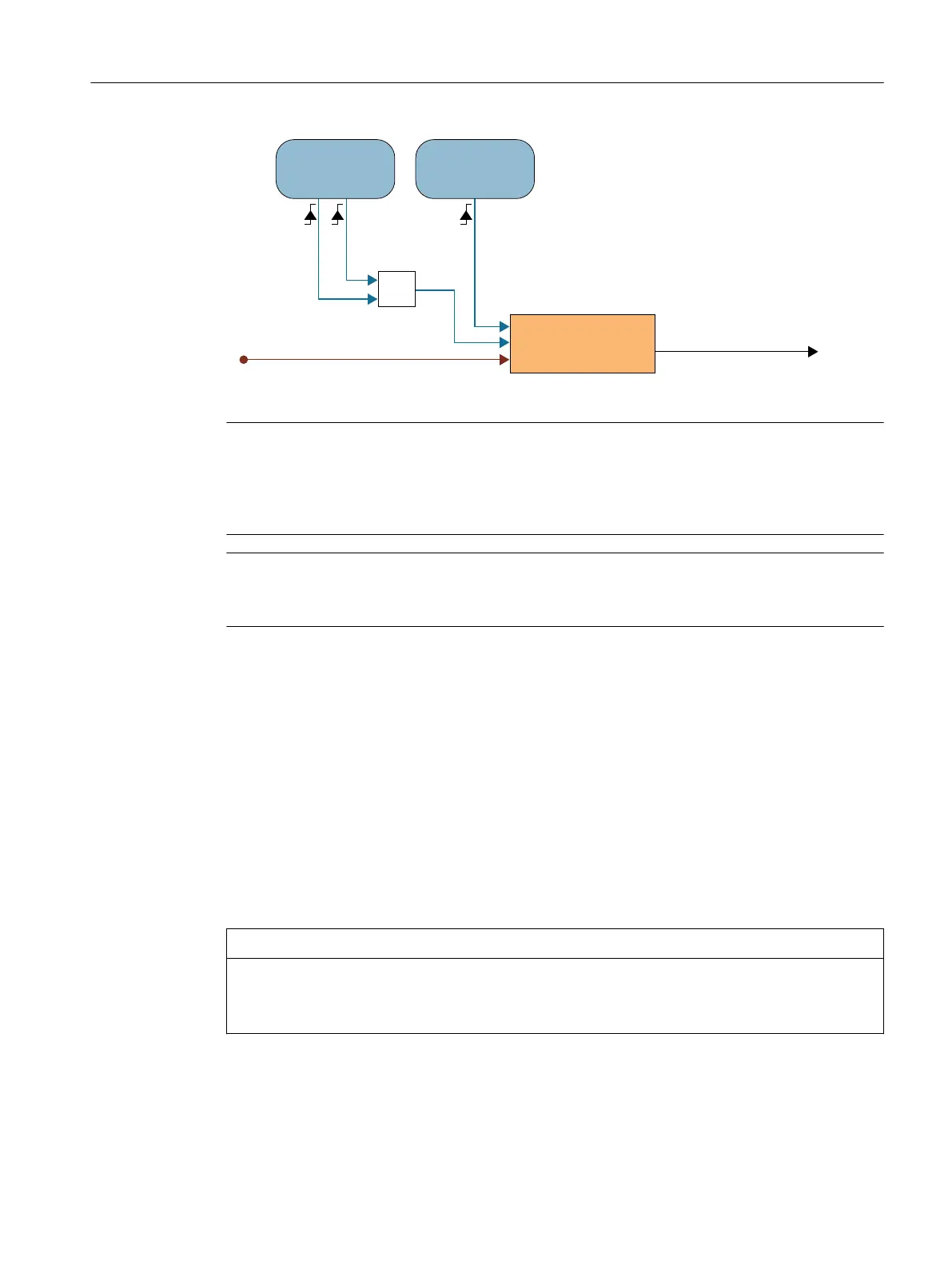
$VVLVWHG'ULYHV\VWHP
$VVLVWHG'ULYHHQDEOLQJ
,PSXOVH'ULYH
VORZRSHQVORZFORVH
GHHQHUJL]H
'&0'
ุ
,03'599HOR
$VVLVWHG'ULYH
$6'5,03'59,QFU
'&0'
Figure 4-7 Automatic AssistedDrive system
Note
Once the automatic AssistedDrive system has deleted a drive order due to insucient support
force, the ImpulseDrive detection becomes active again. However, the ImpulseDrive lead time
(p1220) must be taken into account. It has a direct eect on the signal chain of the automatic
AssistedDrive system.
Note
The conguration of the ImpulseDrive and the AssistedDrive detection has a direct eect on the
automatic AssistedDrive system.
4.3.7 Positioning mode
Positioning mode serves to absolutely position the drive. The positioning system calculates a
drive prole for the optimum movement of the drive to the required target position on the basis
of the driving curve parameters and the current distance from the target position. Positioning
mode does not include any position control and operates with an accuracy of 1 cm. The source
voltage brake is activated once the target position has been reached. After the target position
has been reached, the door can be moved ±2 cm out of the target position before the drive
returns to the target position. The positioning system operates with hysteresis. The drive
responds dynamically (including reversing) to changes in the target position data while keeping
to the values parameterized for force and energy limiting.
NOTICE
Obstruction detection
The obstruction detection system is not active in positioning mode (see section Obstruction
detection SIDOOR ATD4xxW (Page 86)).
SIDOOR functions
4.3 Extended functions
ATD4xxW for industrial applications
System Manual, 06/2022, A5E51901827B AA 85

 Loading...
Loading...




