CHAPTER 6 - DETAILED PARAMETER DESCRIPTION
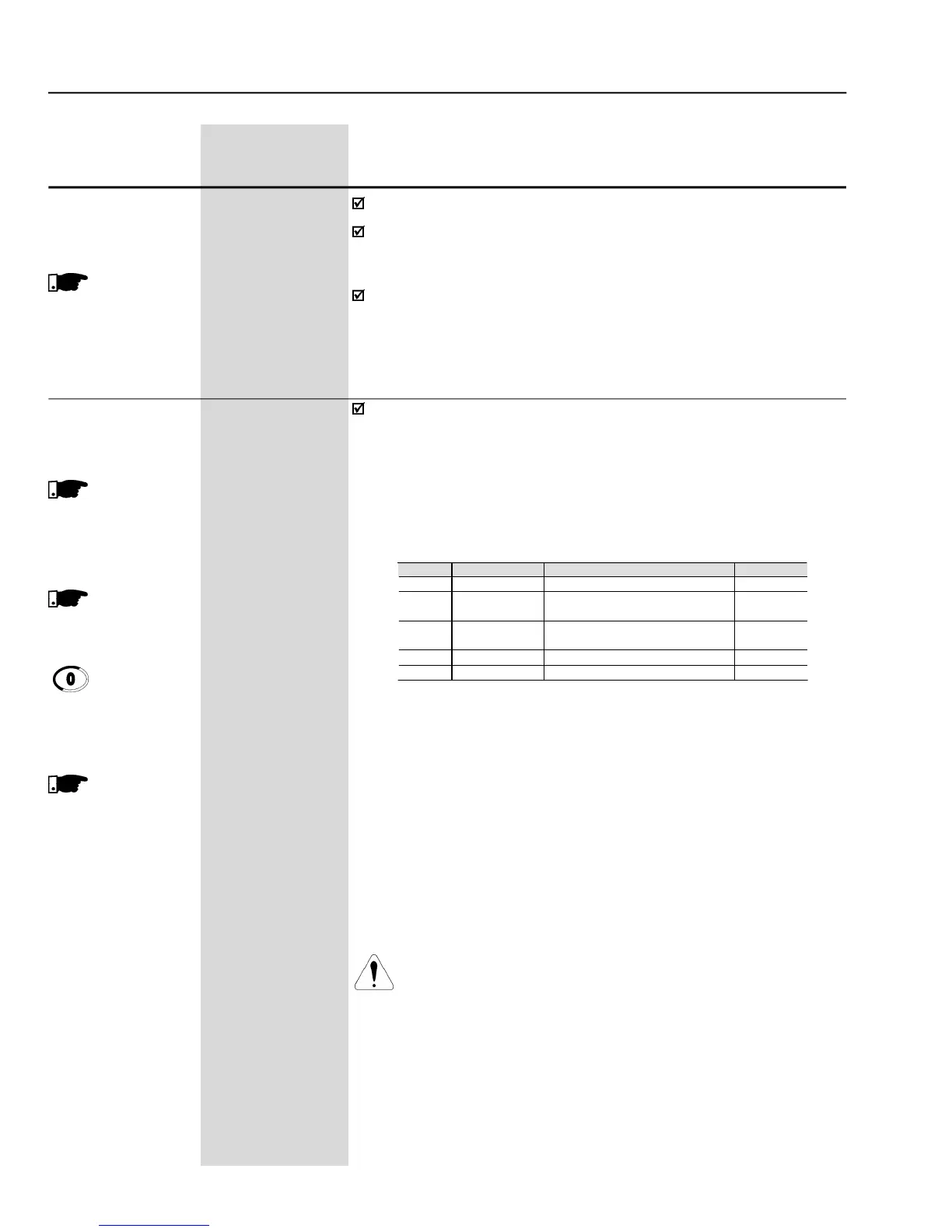
This parameter controls theself-tuning routine,whichestimatesthe value
of parameters related to the motor under use. When P408 is set to
options 1,2,or 3,theself-tuningroutineestimates the value ofparameters
When this parameter is set to option 4, the self-tuning
routine onlyestimates the value of parameter P413.
Best results for the self-tuning routine are obtained with a hot
This parameter sets the motor power factor;
This parameter is important to the correctoperation of the VVW Control.
The incorrect setting of this parameter results in the incorrect calculation
of the slip compensation;
The default value of this parameter is automaticallyset when parameter
P404 is modified. The suggested value is valid onlyfor IV pole standard
three-phase WEG motors. The user shall set this parameter manually
-Themotorremains stationaryduringtheself-tuningroutine.
Thevalue ofP410is obtained from a table, which is valid for WEG motors
Thus, P410 must be set to zero before starting the self-tuning routine. If
0, the self-tuning routine will keep the existing value.
When using a non-WEG motor, set P410 to the proper value (no
load current) before running the self-tuning routine.
- The value of P410 is estimated with the motor rotating.
This option shall be executed without load coupled to the motor.
If the self-tuning routine is executed with a load coupled to the
motor and with P408 setto option2 (RunforImr), a wrong value of
P410(Imr) maybe obtained. This will resultin a wrong estimation
of P412 (Lr/Tr Constant) and P413 (Mechanical Time Constant -
Tm).An overcurrent fault (E00) mayalso occur during the inverter
The word “load” represents anything coupled to the motor
shaft such as a gearbox, an inertia wheel, etc.
Sensorless Vector, Vector with
Sensorless Vector or Vector
 Loading...
Loading...





