8.12 Manual Tuning
8.12.2 Compatible Adjustment Functions
8-81
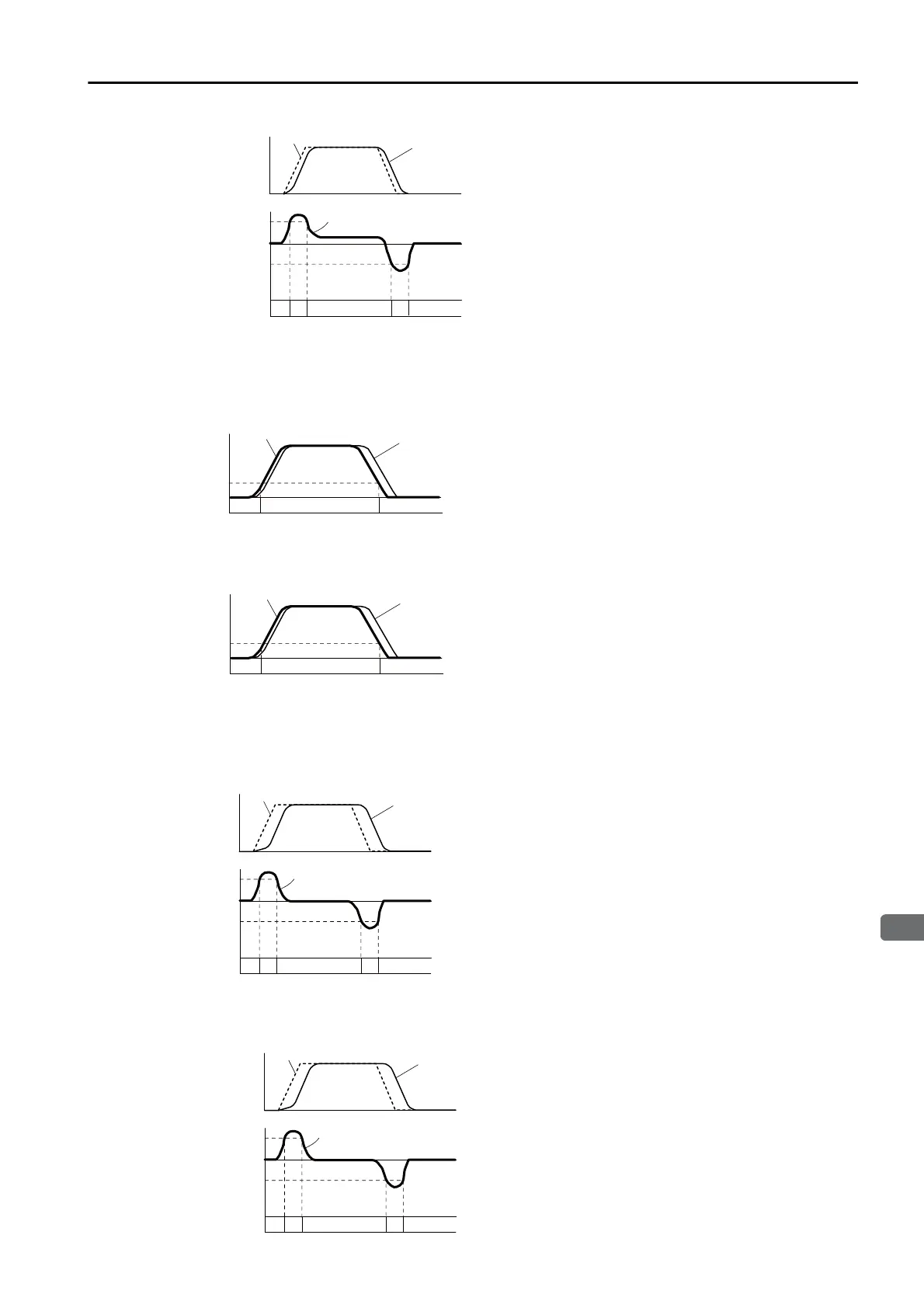
Using the Speed Reference as the Mode Switching Condition
• Rotary Servomotors
When the speed reference equals or exceeds the speed set for the mode switching level for a
speed reference (Pn10D), the speed loop is changed to P control.
• Linear Servomotors
When the speed reference equals or exceeds the speed set for the mode switching level for a
speed reference (Pn181), the speed loop is changed to P control.
Using the Acceleration as the Mode Switching Condition
• Rotary Servomotors
When the speed reference equals or exceeds the acceleration rate set for the mode switching
level for acceleration (Pn10E), the speed loop is changed to P control.
• Linear Servomotors
When the speed reference equals or exceeds the acceleration rate set for the mode switching
level for acceleration (Pn182), the speed loop is changed to P control.
+Pn10C
-Pn10C
PI
P
P
Speed reference
Speed
Motor speed
Time
Torque reference
Torque reference 0
PI control PI control
Pn10D
PI
Speed
Speed reference
Motor speed
Time
PI controlP control
Pn181
PI
Speed
Speed reference
P control
Motor speed
Time
PI control
+Pn10E
-Pn10E
PI PP
Speed
Speed reference
Motor speed
Time
Motor acceleration
Speed 0
PI control PI control
+Pn182
-Pn182
PI PP
Speed
Speed reference
Motor speed
Time
Motor acceleration
Acceleration 0
PI control PI control

 Loading...
Loading...


