Extra plate
Lower Joint
Bound (m)
Extra plate
Upper Joint
Bound (m)
Robot
Lower Joint
Bound (m)
Robot
Upper Joint
Bound (m)
Travel L (m)ModulesTrack L
(mm)
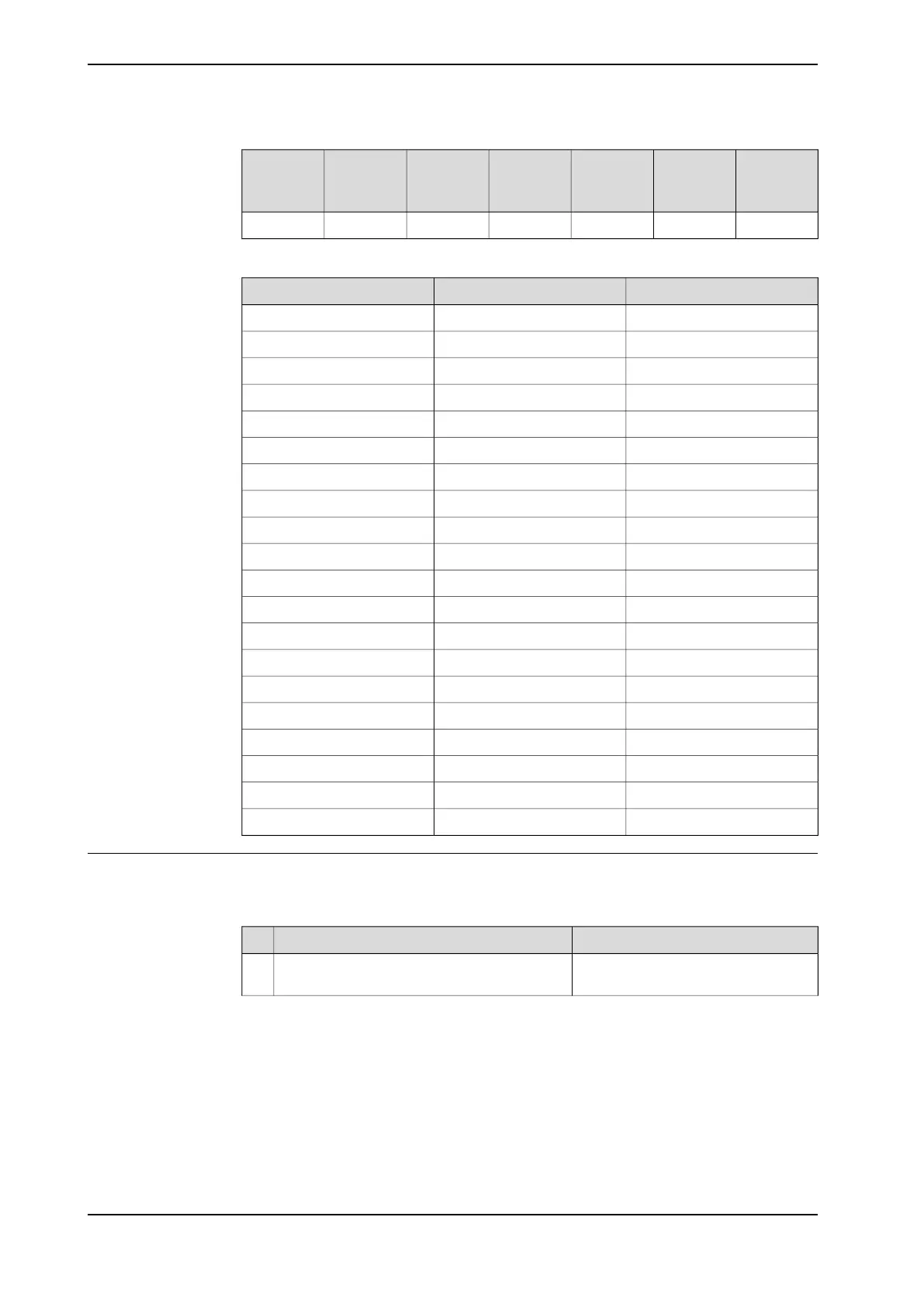
-0.3417.1-0.516.917.442121230
Multi transfer carriages (one module overlap)
Lower Joint Bound (m)Upper Joint Bound (m)Travel L (m)
-0.50.350.85
-0.51.351.85
-0.52.352.85
-0.53.353.85
-0.54.354.85
-0.55.355.85
-0.56.356.85
-0.57.357.85
-0.58.358.85
-0.59.359.85
-0.510.3510.85
-0.511.3511.85
-0.512.3512.85
-0.513.3513.85
-0.514.3514.85
-0.515.3515.85
-0.516.3516.85
-0.517.3517.85
-0.518.3518.85
-0.519.3519.85
Identifying the upper and lower limits by experiment
If the actual value of the limit is not known, it is possible to jog the track to the
desired limit position, and then read the limit value from the FlexPendant.
NoteAction
Before beginning, make sure that the revolution
counter for the IRBT 2005 is updated.
1
Continues on next page
130 Product manual - IRBT 2005
3HAC051130-001 Revision: F
© Copyright 2015 - 2018 ABB. All rights reserved.
2 Installation and commissioning
2.7.3 Setting upper and lower software limits for the track
Continued

 Loading...
Loading...





