NoteAction
xx1400001921
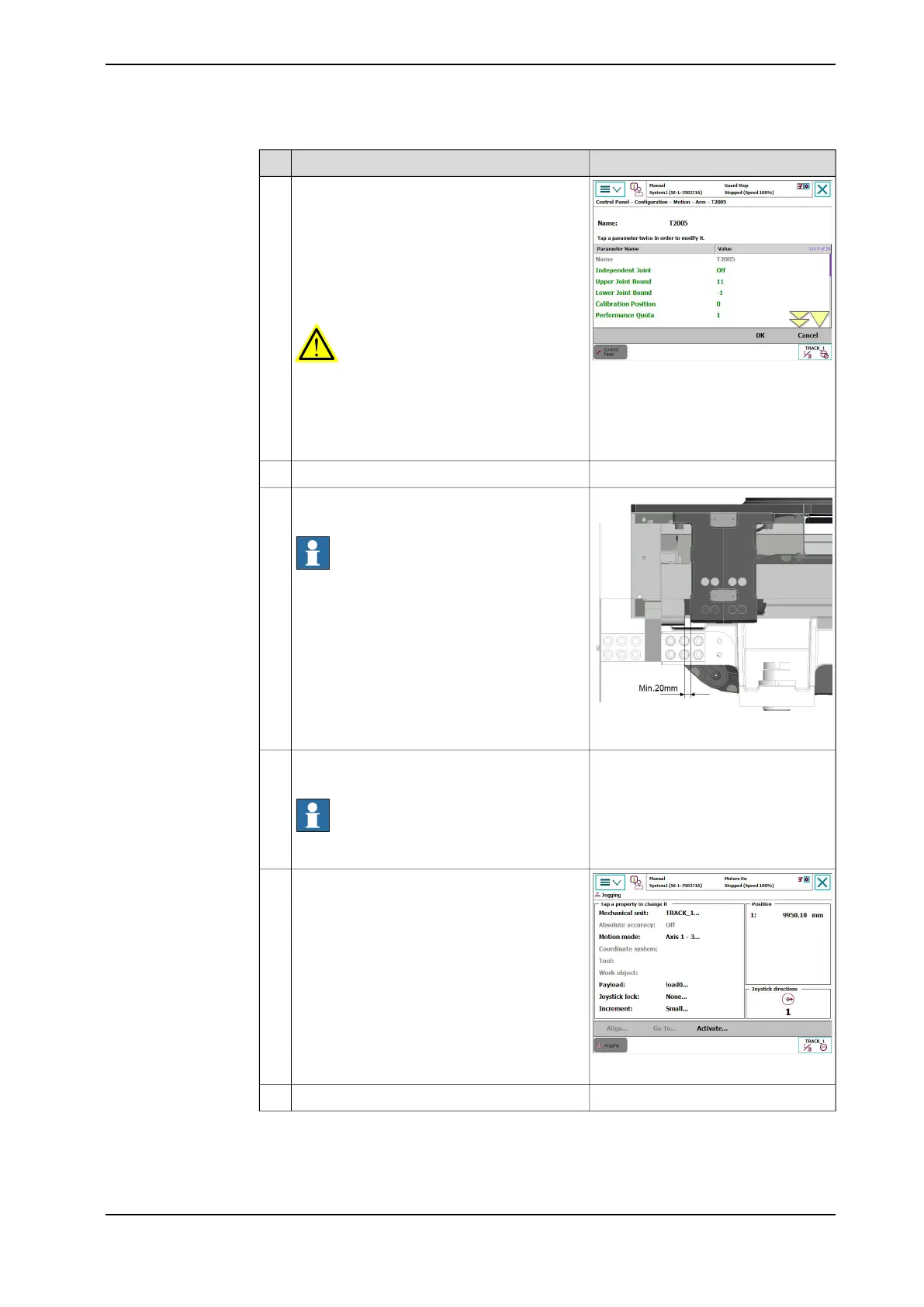
The upper and lower limit monitoring is active
when in manual mode, thus it is first necessary
increase the current limit to beyond the mech-
anical stop. This will then allow the track to be
jogged without error up to the desired limit
position.
ARM : -upper_joint_bound 11 -
lower_joint_bound -1
WARNING
If the actual track length is 10 meters in the
positive direction of movement, and -0.060
meter in the negative direction, then first set
the upper bound to 11 meters and the lower
bound to -1 meters.
2
Restart the controller.3
xx1400001923
Jog the mechanical unit to the desired limit
position as shown in the figure.
Note
A minimum distance of 20 mm should be used
between where the software limit is set and the
actual mechanical stop.
4
In the jogging window, read the current position
for the track motion.
Note
The distance is shown in millimeters.
5
xx1400001922
Update the limit value in the MOC file. (In this
example it is 9950.1 mm.)
ARM: -upper_joint_bound 9.950 -
lower_joint_bound -1
6
Restart the controller.7
Continues on next page
Product manual - IRBT 2005 131
3HAC051130-001 Revision: F
© Copyright 2015 - 2018 ABB. All rights reserved.
2 Installation and commissioning
2.7.3 Setting upper and lower software limits for the track
Continued

 Loading...
Loading...





