Peripheral Devices
9836 3521 01 603
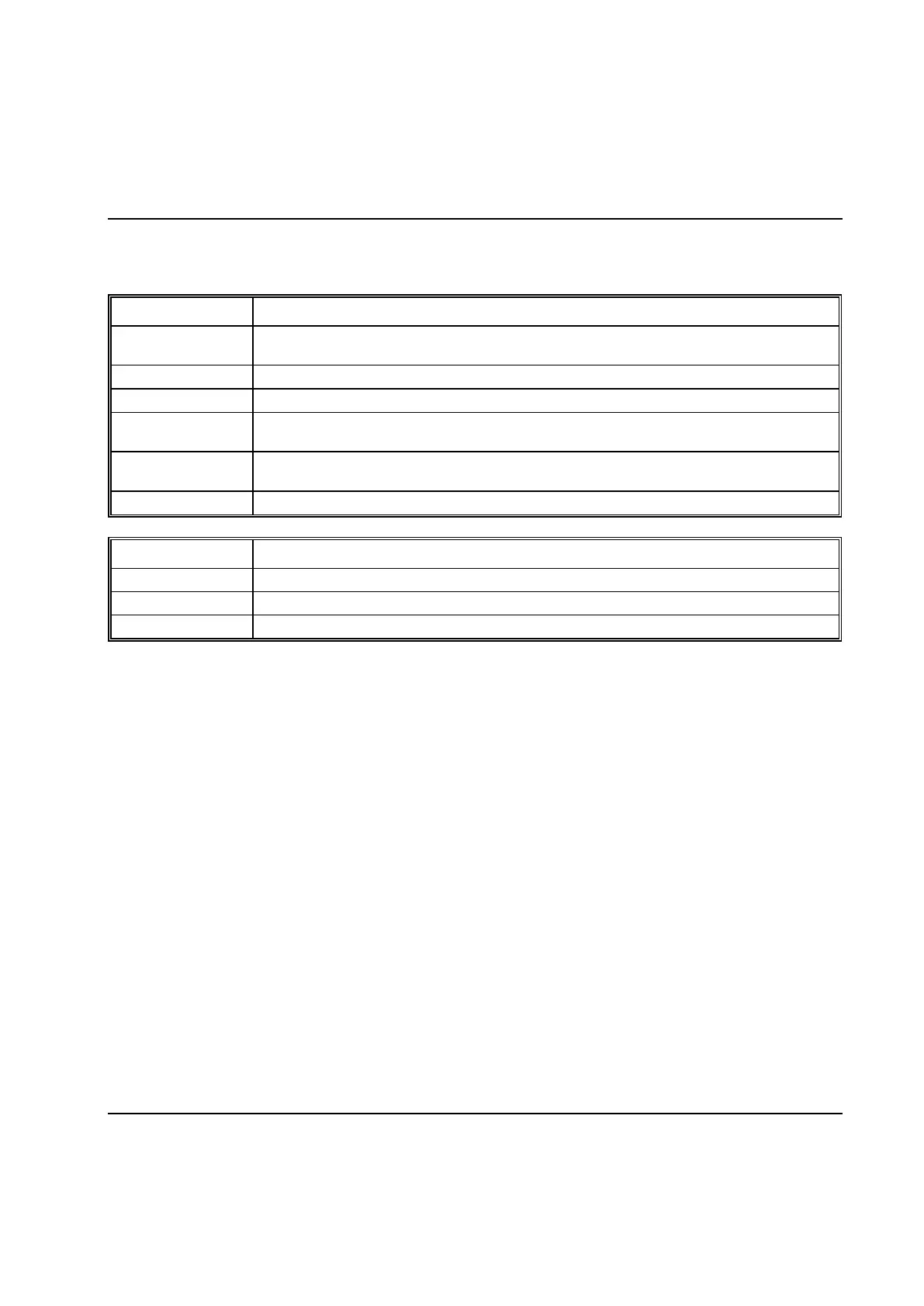
Whether torque and angle are considered OK or not for a bolt is decided by the data in the corresponding
Bolt level result variables "Errors". The below tables shows which error bits that are used, and for what
purpose.
TTNOTRM (Threshold torque not reached for angle monitoring, see chapter: Monitoring
Check – Angle )
CROSSGR (Cross gradient restriction exceeded, see chapter: Cross Thread and Gradient)
RFTLIMRE (Remove Fastener Torque Limit REeached, see chapter: Program )
TLM (Final torque too low during monitoring, see chapter: Monitoring Check – Final Peak
Torque)
THM (Final torque too high during monitoring, see chapterMonitoring Check – Final Peak
Torque)
True only if the status of the bolt is OK
ALM (Angle too low during monitoring, see chapter: Monitoring Check – Angle )
AHM (Angle too high during monitoring, see chapterMonitoring Check – Angle )
True only if the status of the bolt is OK
If several of the above errors occur during a cycle they are prioritised so that the worse, or most "red",
error wins. That is, the priority order is (most significant error has lowest number):
1. The Red lamp only
2. The Yellow + Red lamps
3. The Yellow lamp
4. The Green lamp.
Note! If a bolt ends with status NOK and none of the errors listed above are at hand, or the control
strategy is undefined, then none of the lamps will be switched on.
This situation can occur if the monitoring checks and restrictions listed above are not used, or if the
program does not include any step defining a control strategy.
The monitoring checks must always be evaluated, thus Ignore monitoring errors when step ends
NOK cannot be checked.

 Loading...
Loading...








