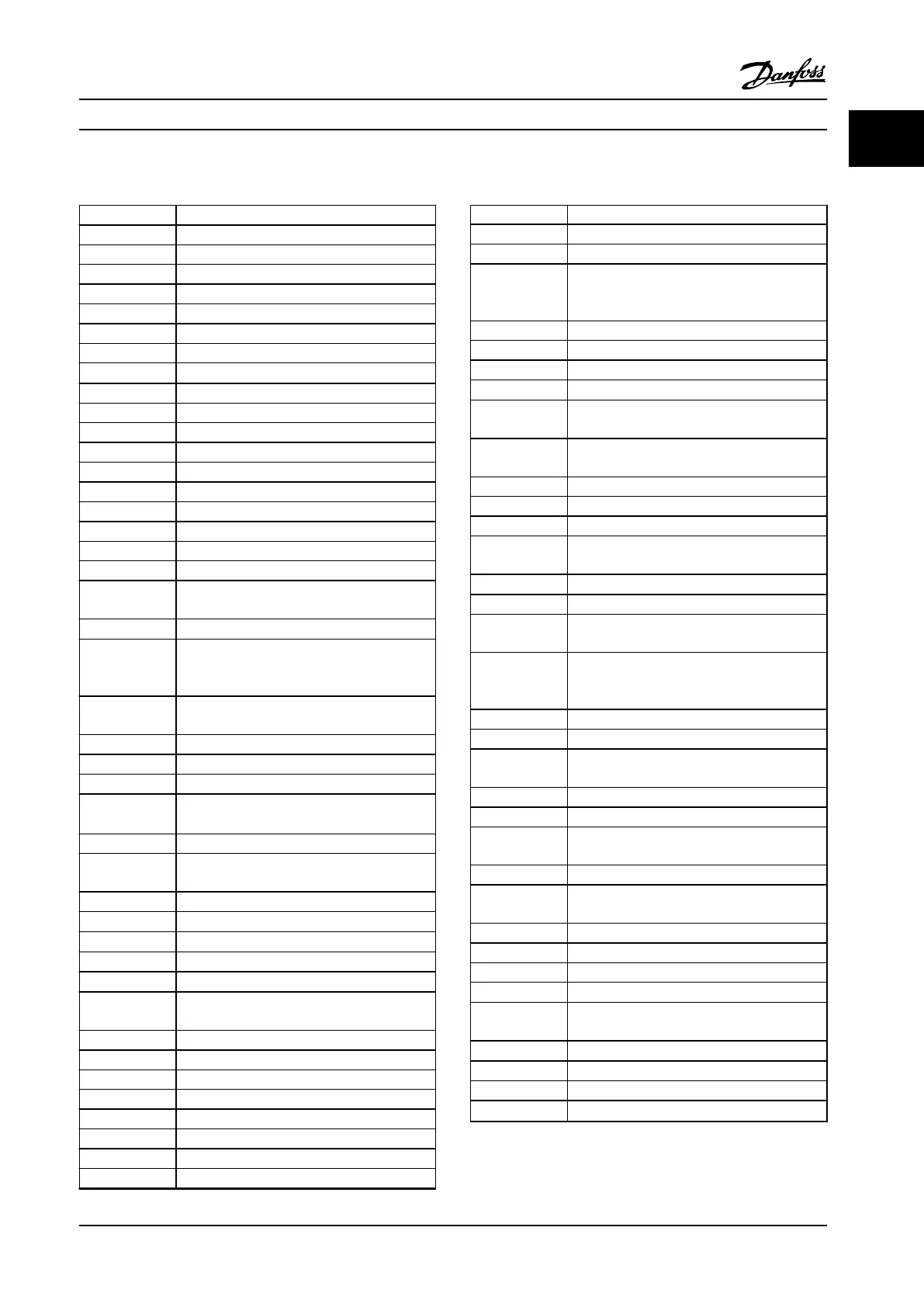
1.4 Abbreviations, Symbols and Conventions
60° AVM 60° asynchronous vector modulation
A Ampere/AMP
AC Alternating current
AD Air discharge
AEO Automatic energy optimization
AI Analog input
AMA Automatic motor adaptation
AWG American wire gauge
°C
Degrees celsius
CD Constant discharge
CM Common mode
CT Constant torque
DC Direct current
DI Digital input
DM Dierential mode
D-TYPE Drive dependent
EMC Electromagnetic compatibility
EMF Electromotive force
ETR Electronic thermal relay
f
JOG
Motor frequency when jog function is
activated.
f
M
Motor frequency
f
MAX
The maximum output frequency the
adjustable frequency drive applies on its
output.
f
MIN
The minimum motor frequency from
adjustable frequency drive.
f
M,N
Nominal motor frequency
FC Adjustable frequency drive
g Gram
Hiperface
®
Hiperface
®
is a registered trademark by
Stegmann
hp Horse power
HTL HTL encoder (10–30 V) pulses - High-voltage
transistor logic
Hz Hertz
I
INV
Rated inverter output current
I
LIM
Current limit
I
M,N
Nominal motor current
I
VLT,MAX
The maximum output current
I
VLT,N
The rated output current supplied by the
adjustable frequency drive
kHz Kilohertz
LCP Local control panel
lsb Least signicant bit
m Meter
mA Milliampere
MCM Mille circular mil
MCT Motion control tool
mH Inductance in millihenry
min Minute
ms Millisecond
msb Most signicant bit
η
VLT
Eciency of the adjustable frequency drive
dened as the ratio between power output
and power input.
nF Capacitance in nano Farad
NLCP Numerical local control panel
Nm Newton meter
n
s
Synchronous motor speed
Online/Oine
Parameters
Changes to online parameters are activated
immediately after the data value is changed.
P
br,cont.
Rated power of the brake resistor (average
power during continuous braking).
PCB Printed circuit board
PCD Process data
PELV Protective extra low voltage
P
m
Adjustable frequency drive nominal output
power as high overload (HO).
P
M,N
Nominal motor power
PM motor Permanent magnet motor
Process PID The PID regulator maintains the desired speed,
pressure, temperature, and so on.
R
br,nom
The nominal resistor value that ensures a
brake power on the motor shaft of 150/160%
for 1 minute
RCD Residual current device
Regen Regenerative terminals
R
min
Minimum permissible brake resistor value by
adjustable frequency drive
RMS Root mean square
RPM Revolutions per minute
R
rec
Recommended brake resistor resistance of
Danfoss brake resistors
s Second
SFAVM Stator ux-oriented asynchronous vector
modulation
STW Status word
SMPS Switch mode power supply
THD Total harmonic distortion
T
LIM
Torque limit
TTL TTL encoder (5 V) pulses - transistor transistor
logic
U
M,N
Nominal motor voltage
V Volts
VT Variable torque
VVC
+
Voltage vector control
Table 1.1 Abbreviations
Introduction
Design Guide
MG20N622 Danfoss A/S © 09/2014 All rights reserved. 9
1
1

 Loading...
Loading...


















