6. Diagnostics and optimization
6−58
Festo P.BE−SPC200−WIN−PISA−CD−EN en 0901d
6.7.2 Description of the controller factors
The SPC200 calculates various controller parameters from the
basis parameters. These controller parameters determine the
dynamics (speed) as well as the transfer behaviour (damping)
of the control. The aim is to guarantee fast no−overswing posi
tioning with few contour errors (dynamic controlling devi
ation).
The controller parameters calculated by the SPC200 are
therefore normally
the optimum values. The (real) pneumatic
axes used do not, however, always correspond to the (ideal)
axes used as a basis for control. In order to account for any
possible deviations, you can influence the control parameters
by entering factors.
Instructions on optimizing the positioning behaviour can be
found in section 6.7.4.
The factors
are standarized to 1.0 by the SPC200. By increas
ing the factors > 1), you can correspondingly increase the
parameters; by decreasing the factors (< 1), you can corre
spondingly decrease the parameters.
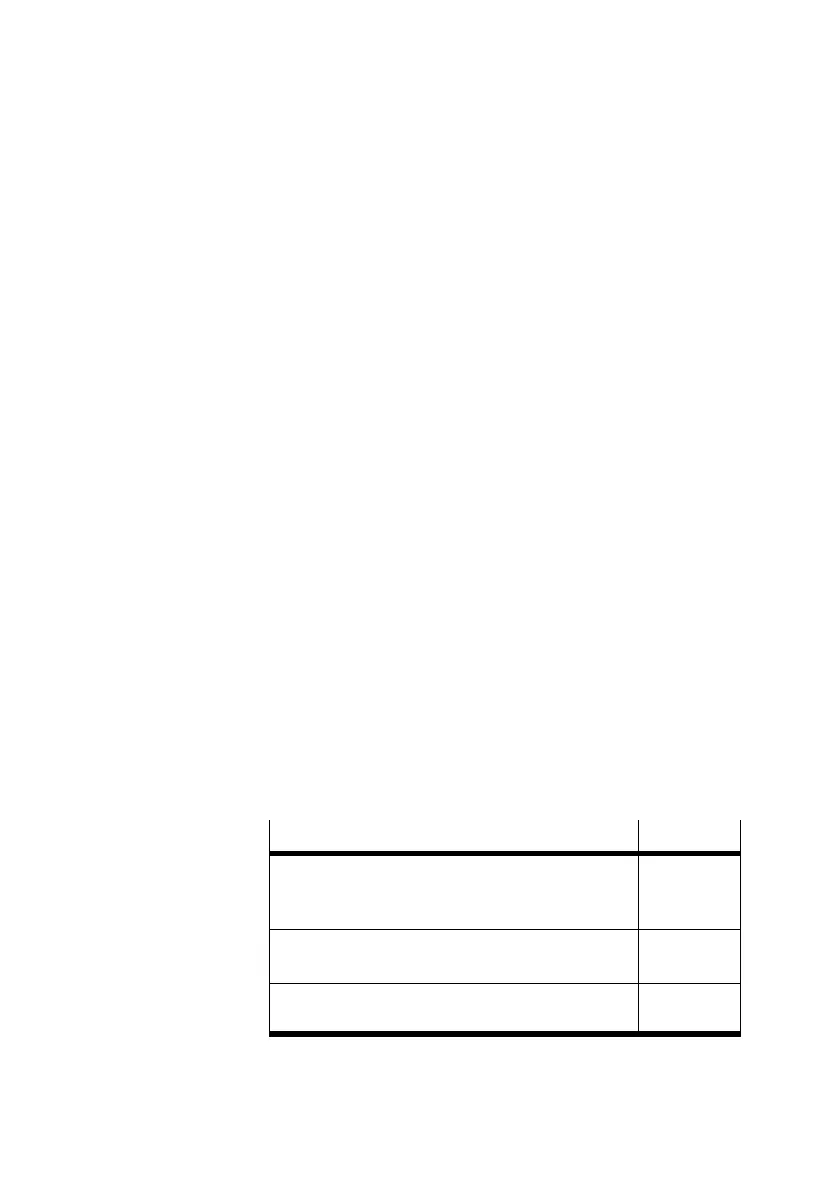
Gain factor With the gain factor you can influence the sensitivity with
which the closed−loop positioning reacts to the modifications
to the
measured variables" (position, speed, acceleration).
Behaviour of axis
Factor
The drive tends to instability (tendency to oscillate
when positioning, up to continuous oscillation
around the reference position).
Decrease
Bad positioning accuracy or too many contour errors
as well as long positioning time.
Increase
The positioning procedure is carried out quickly and
accurately.
Optimum
Permitted: 0.1 ... 10.0