E1 Series Servo Drive User Manual Basic Function Settings Before Operation
6-24 HIWIN MIKROSYSTEM CORP.
Table6.10.2.1
Parameter Pt52C Range 10~100
Position mode, velocity mode
and torque mode
Default 100 Effective After power on Unit 1%
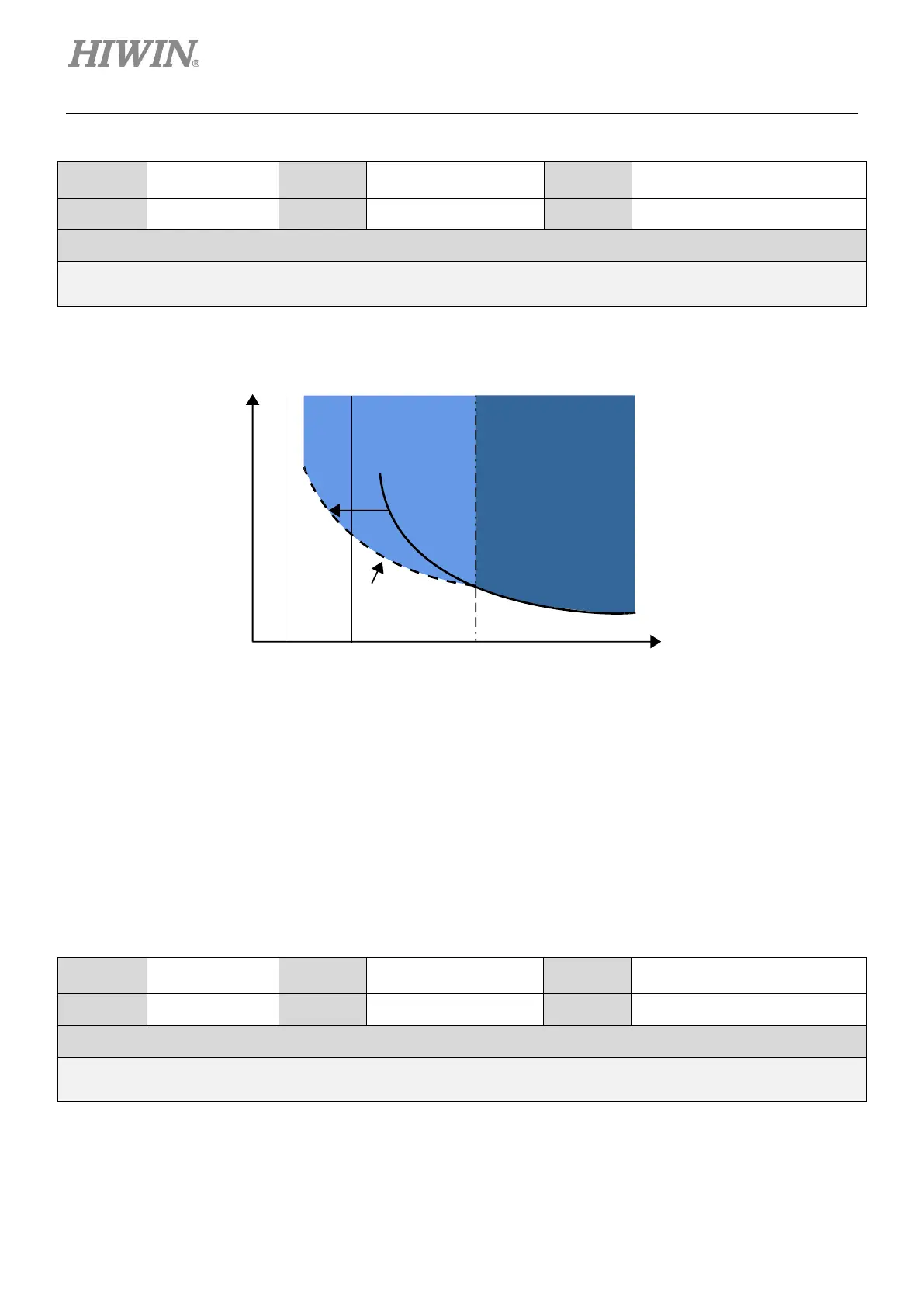
Description
Set current derating value at motor overload detection.
Motor overload can be avoided if overload alarm (AL.720) is detected earlier.
Figure6.10.2.1
6.10.3 Maximum duration for motor peak current
When motor has been continuously supplied with its rated peak current, it could result in overheating and
damage the motor. Set Pt52E (Maximum duration for motor peak current) to provide software protection.
When the servo drive detects the output current reaches the value of motor peak current, after the time
set in Pt52E elapses, alarm AL.710 (Overload (instantaneous maximum load)) occurs.
Table6.10.3.1
Parameter Pt52E Range 5~600
Position mode, velocity mode
and torque mode
Default 10 Effective After power on Unit 100 ms
Description
Set the maximum duration for motor peak current.
Note:
(1) Set Pt52E according to the specification of your motor. Otherwise, the motor could be damaged.
(2) If you are using standard HIWIN AC servo motor, Pt52E will be automatically set after the motor is connected.
Overload alarm
detection curve when
Pt52C = 50%
Torque command [%]
Overload detection time
100% 200%0.5
AL.710
AL.720

 Loading...
Loading...


