E1 Series Servo Drive User Manual Tuning
HIWIN MIKROSYSTEM CORP. 10-7
10.3.2 Setting tuneless function
When vibration or position deviation overflow occurs, adjust stiffness level of tuneless function via
Thunder or the servo drive panel.
(1) Before adjusting stiffness level
Ensure tuneless function (Pt170 = t.1) is enabled before adjusting stiffness level of tuneless
function.
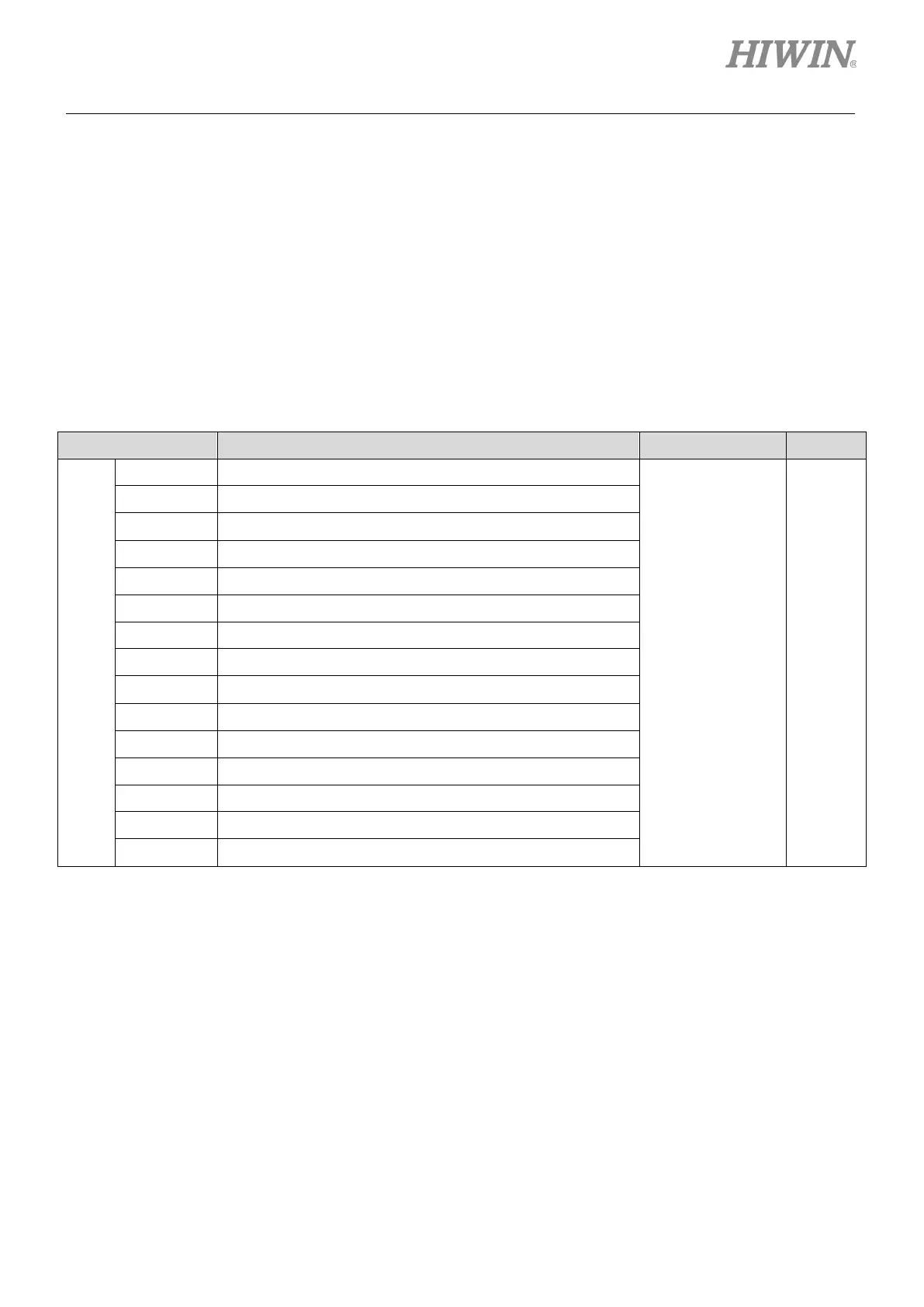
(2) Stiffness level of tuneless function
Table10.3.2.1
Parameter Description Effective Category
Pt170
t.1 Stiffness level of tuneless function 1 (Low)
Immediately Setup
t.2 Stiffness level of tuneless function 2
t.3 Stiffness level of tuneless function 3
t.4 Stiffness level of tuneless function 4
t.5 Stiffness level of tuneless function 5
t.6 Stiffness level of tuneless function 6
t.7 Stiffness level of tuneless function 7
t.8 Stiffness level of tuneless function 8
t.9 Stiffness level of tuneless function 9
t.A Stiffness level of tuneless function 10
t.B Stiffness level of tuneless function 11
t.C Stiffness level of tuneless function 12
t.D Stiffness level of tuneless function 13
t.E Stiffness level of tuneless function 14
t.F Stiffness level of tuneless function 15 (High)
10.3.3 Alarm and corrective action
When resonance sound or larger vibration during position control occurs, please refer to the following.
(1) Resonance sound
Decrease the setting value of Pt170 = t.X or suppress resonance sound by notch filter (Refer
to section 10.6.3.).
(2) Larger vibration during position control occurs
Decrease the setting value of Pt170 = t.X.
 Loading...
Loading...



