E1 Series Servo Drive User Manual Application Function
8-88 HIWIN MIKROSYSTEM CORP.
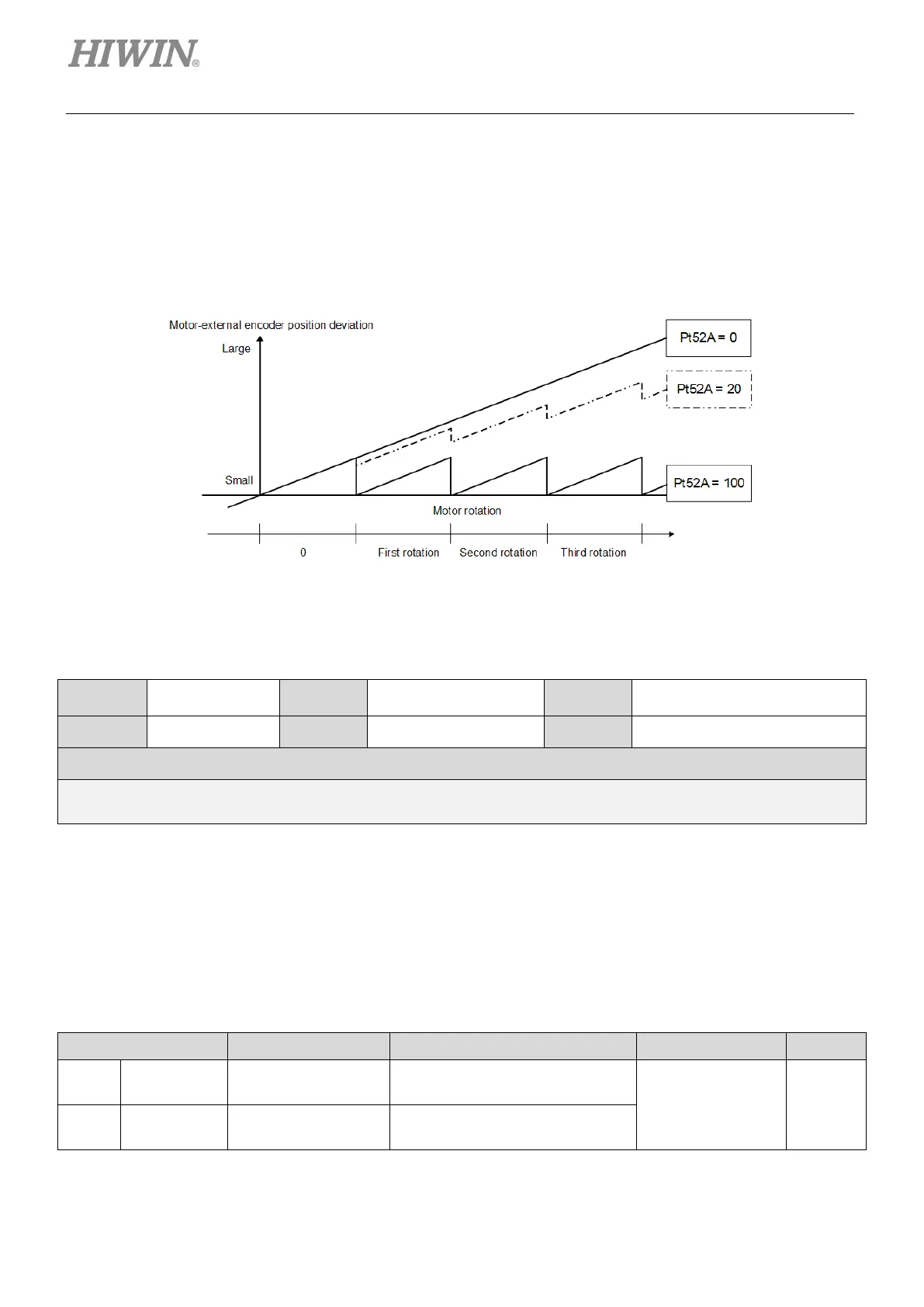
Example:
If the belt slips excessively, increase Pt52A. If Pt52A is set to 0, the servo drive reads the feedback
position from the external encoder directly. The default setting is 20. In the second rotation, the
deviation of the first rotation will be multiplied by 0.8.
Figure8.16.9.1
Table8.16.9.2
Parameter Pt52A Range 0~100
Position mode
Default 20 Effective Immediately Unit 1%
Description
Set the multiplier per one full-closed loop rotation.
8.16.10 Setting analog monitor signal for full-closed loop control
Motor-load position deviation can be monitored.
Table8.16.10.1
Parameter Name Description Effective Category
Pt006 t.07
Analog monitor 1
signal selection
Motor-load position deviation
(0.01 V/1 control unit)
Immediately Setup
Pt007 t.07
Analog monitor 2
signal selection
Motor-load position deviation
(0.01 V/1 control unit)

 Loading...
Loading...


