E1 Series Servo Drive User Manual Application Function
HIWIN MIKROSYSTEM CORP. 8-79
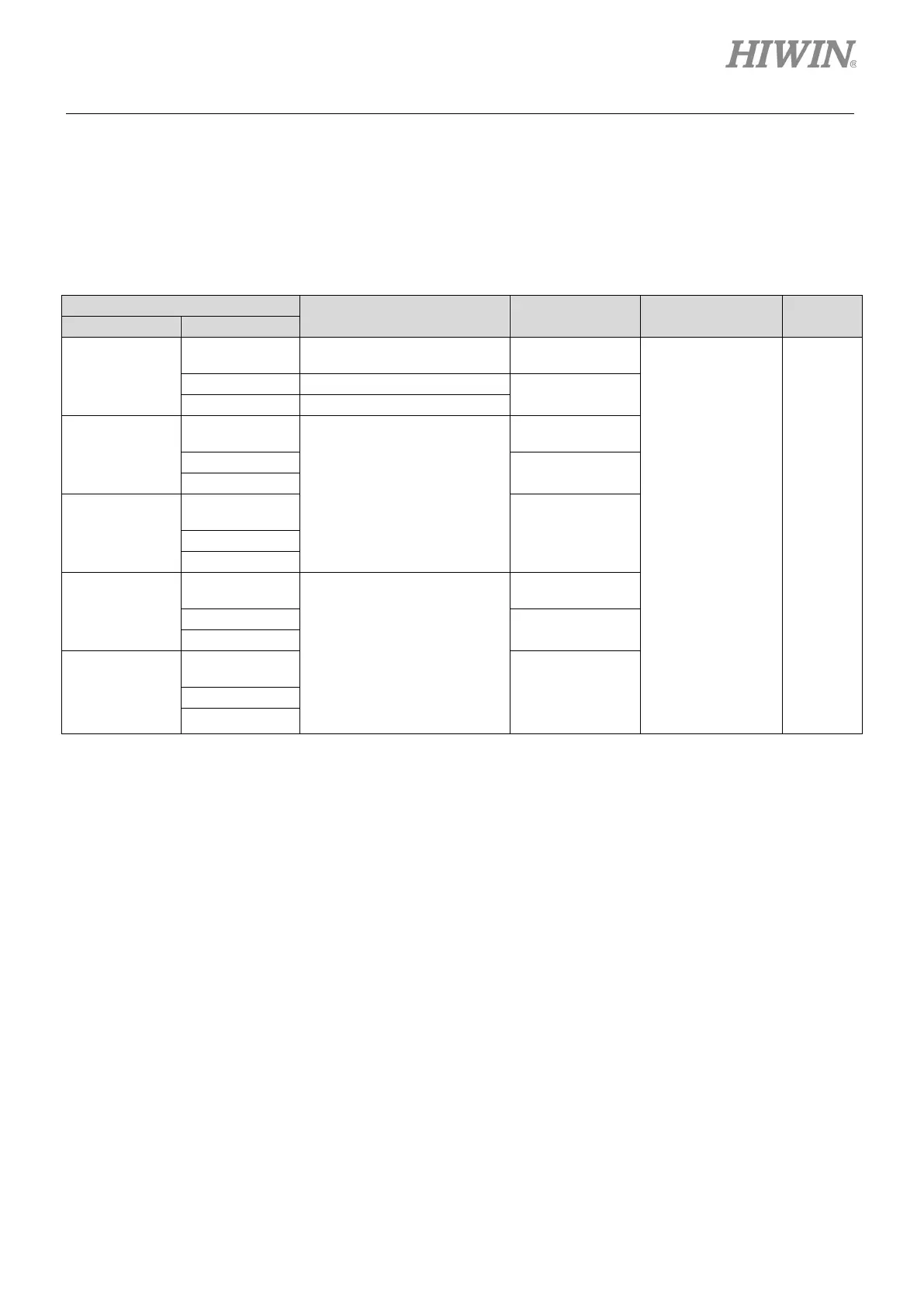
8.15.3 Motor stopping method for forced stop
The motor stopping method for forced stop is set by Pt00A = t.X (Stopping method for forced stop)
and Pt001 = t.X (Stopping method for servo off and Gr.A alarm), please refer to below.
Table8.15.3.1
Motor Stopping Method
Status After
Effective Category
t.0
(Default)
Dynamic brake Dynamic brake
After power on Setup
Free run
t.1
Use the setting value of
Pt406 as the maximum
torque to decelerate the
motor to a stop.
Dynamic brake
Free run
t.2
Free run
t.3
The motor decelerates
according to the setting of
Pt30A.
Dynamic brake
Free run
t.4
Free run
t.2
Note:
(1) In torque mode, the servo motor cannot decelerate to a stop. Use Pt001 = t.X to stop the motor by
dynamic brake or let the motor run freely until it stops.
(2) For more information of Pt406 (Emergency stop torque), please refer to section 6.7.3.
(3) For more information of Pt30A (Deceleration time for servo off and forced stop), please refer to section 6.7.3.
 Loading...
Loading...



