E1 Series Servo Drive User Manual Application Function
HIWIN MIKROSYSTEM CORP. 8-27
Table8.4.3.2
Parameter Pt217 Range 0~1000
Position mode
Default 0 Effective After the motor stops Unit 0.25 ms
Description
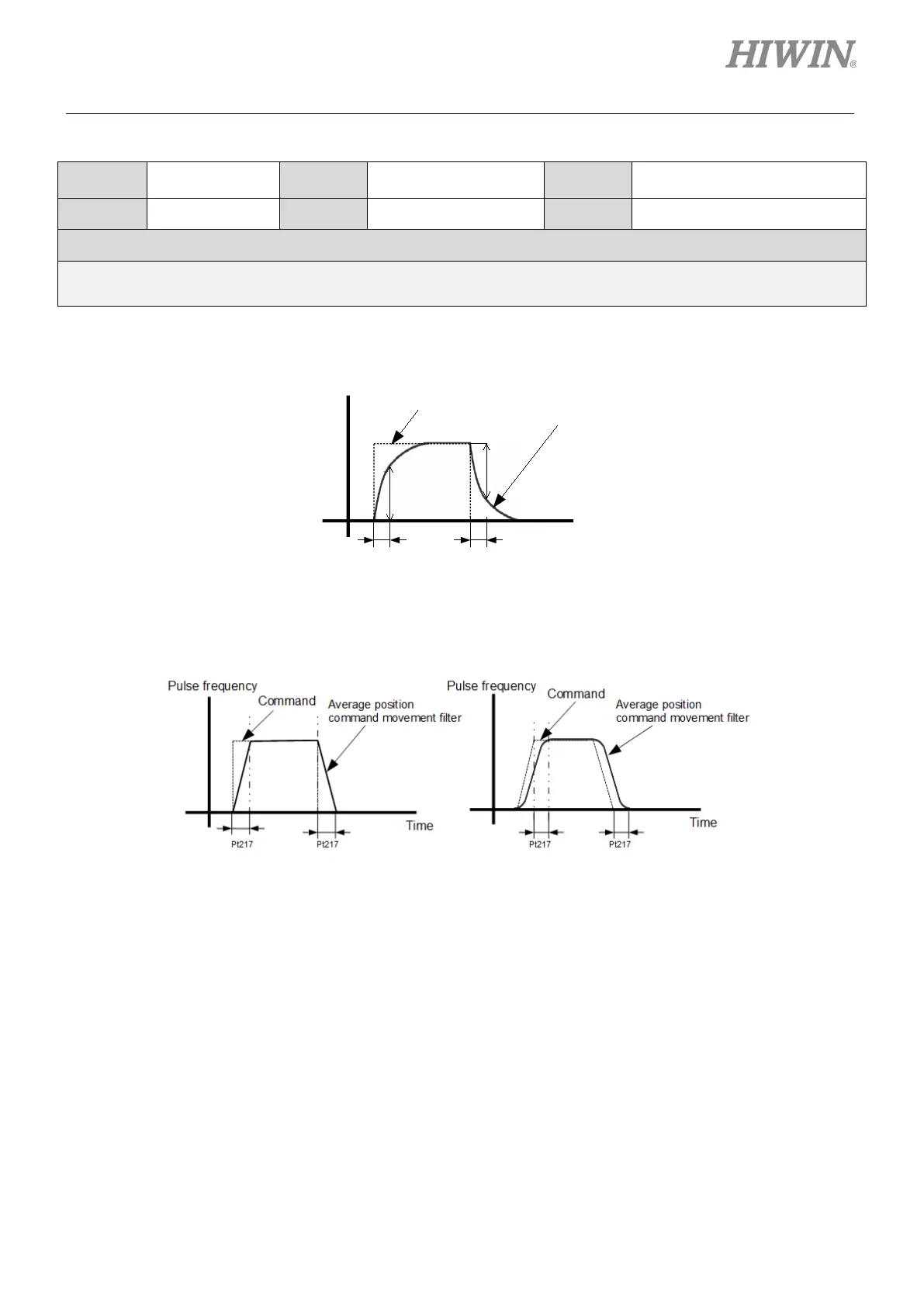
Set average position command movement time.
Position command acceleration/deceleration filter
Figure8.4.3.1
Average position command movement filter
Figure8.4.3.2
Note:
If controller is doing path planning, please pay attention to the setting of smooth function, since smooth function may
influence the path planning of the controller.
Command
Acceleration/deceleration filter
Pulse frequency
Time
63.2%
63.2%
Pt216
Pt216

 Loading...
Loading...


