E1 Series Servo Drive User Manual Application Function
HIWIN MIKROSYSTEM CORP. 8-29
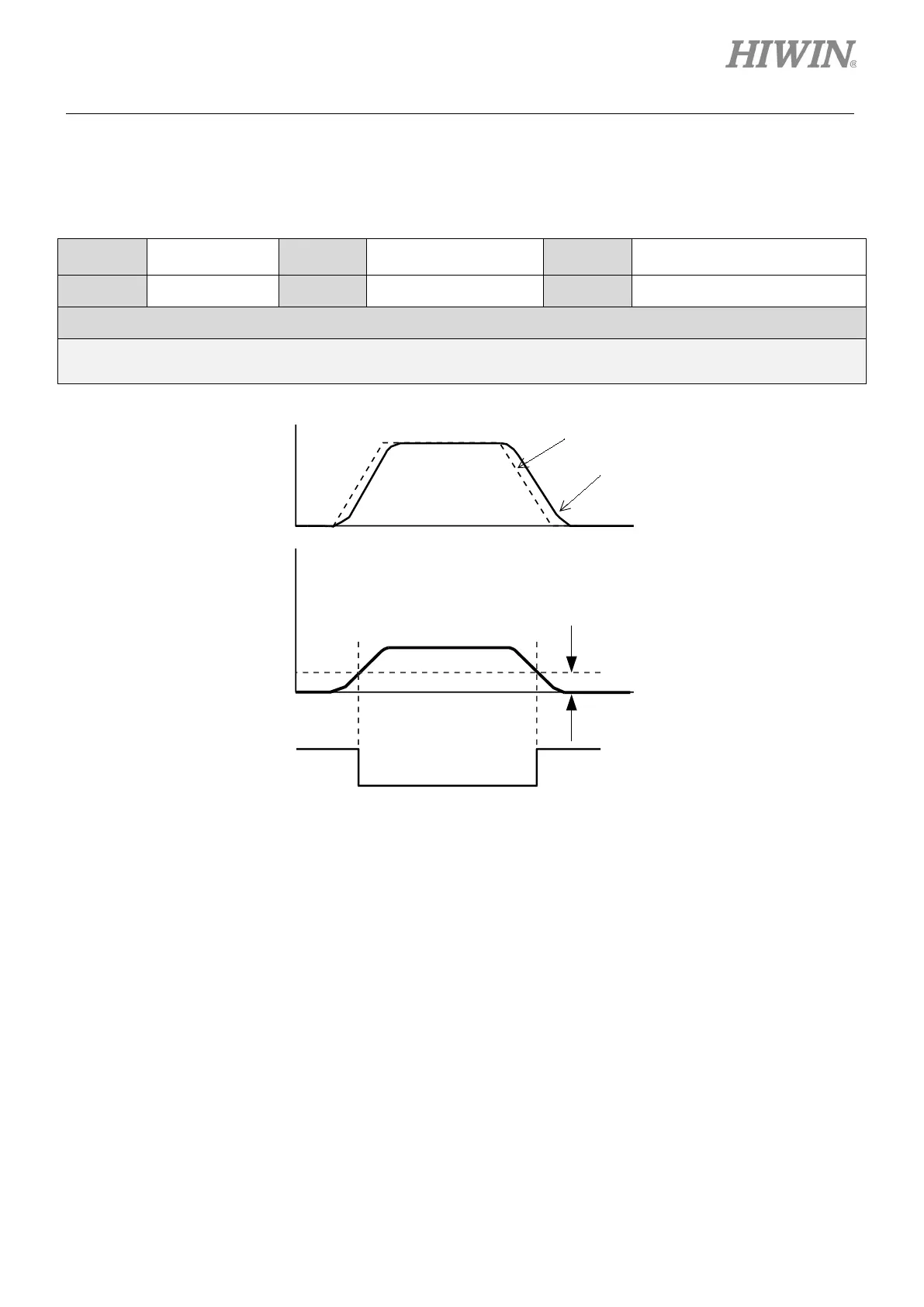
Setting positioning completion width
COIN signal is output when position deviation is smaller than the positioning completion width.
Table8.4.4.2
Parameter Pt522 Range 0~1073741824
Position mode
Default 7 Effective Immediately Unit Control unit
Description
Set positioning completion width.
Figure8.4.4.2
Output timing of positioning completion output (COIN) signal
Users can set to output COIN signal at three different timings. Pt207 = t.X provides three
output timings for COIN signal when position deviation is smaller than the positioning completion
width.
COIN
ON ONOFF
Velocity
Position
deviation
Pt522
Time
Motor
velocity
Command
Time
 Loading...
Loading...



