E1 Series Servo Drive User Manual Application Function
8-36 HIWIN MIKROSYSTEM CORP.
Table 8.5.2.1
Parameter Pt429 Range 0~3000
Position mode, velocity mode
and torque mode
Default 0 Effective Immediately Unit 1 mV
Description
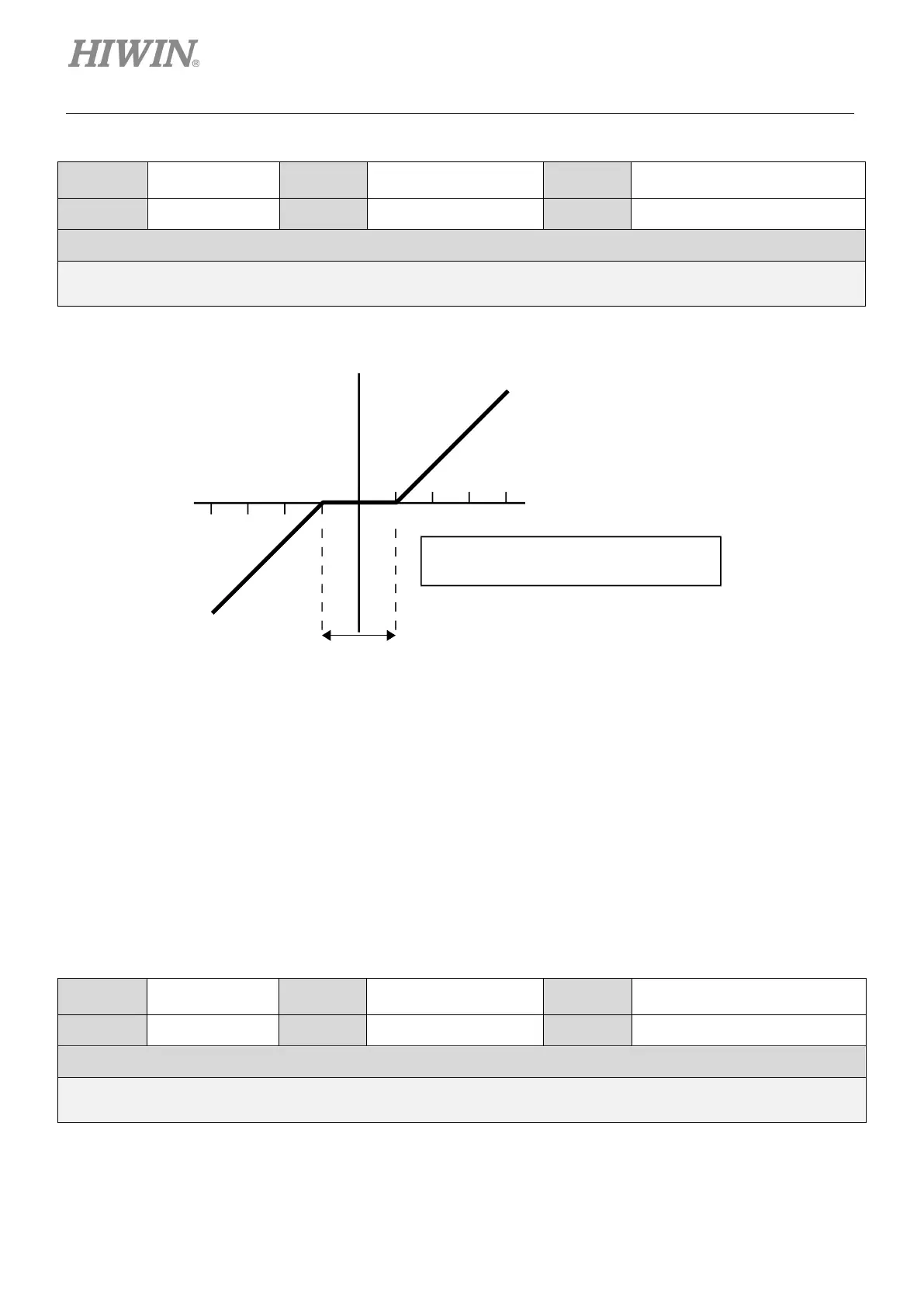
Set the dead band for torque command input.
Figure 8.5.2.1
8.5.3 Torque command filter
Torque command filter is used for torque command input signal (T-REF). Torque command becomes
smoother after torque command filter is applied. The higher the setting value is, the smoother the torque
command becomes. If the setting value is too large, the response of torque command decreases.
Table8.5.3.1
Parameter Pt415 Range 0~65535
Position mode, velocity mode
and torque mode
Default 0 Effective After the motor stops Unit 0.01 ms
Description
Set T-REF filter time constant.
Output torque (%)
Torque command voltage (mV)
When the voltage of torque command is 0 V, the
jitter is -7 mV~10 mV.
Pt429 can be set to 10.
10
Dead band
(Range of analog voltage jitter)
Note:
When dead band is applied, since the motor torque
is converted from analog voltage by Pt400, the motor torque
will be affected.
0
-10
 Loading...
Loading...



