E1 Series Servo Drive User Manual Application Function
8-58 HIWIN MIKROSYSTEM CORP.
Torque command input (T-REF) signal
The input signal used to limit toque with analog command is described as below.
Limiting toque with analog command
Set Pt002 to t.1. T-REF+ and T-REF- signals are used as input signals for torque limit.
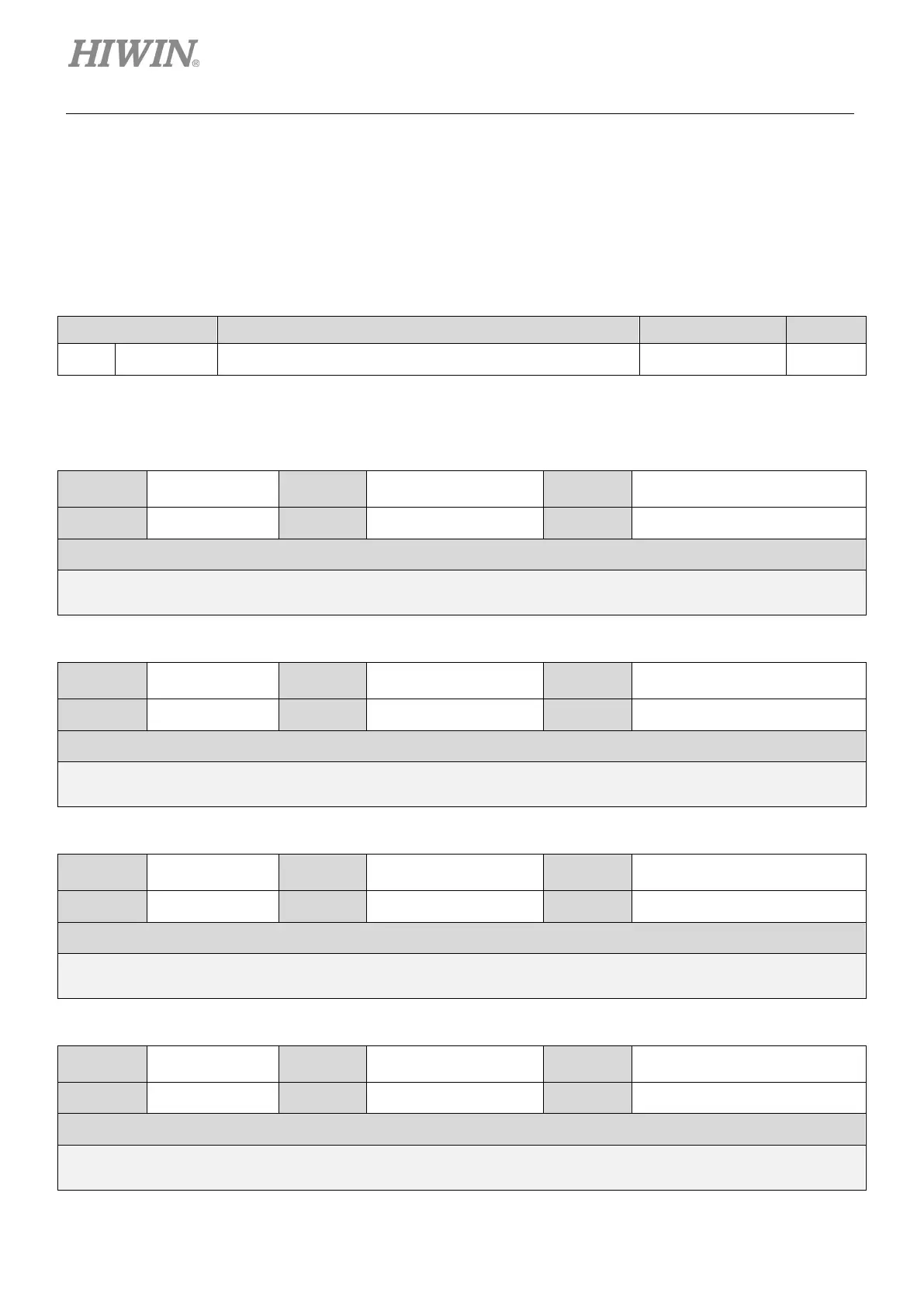
Table8.10.3.1
Parameter Description Effective Category
Pt002 t.1 Use T-REF signals as torque limit. After power on Setup
Related parameters
Table8.10.3.2
Parameter Pt400 Range 10~100
Position mode, velocity mode
and torque mode
Default 30 Effective Immediately Unit 0.1 V
Description
Set torque command input gain.
Table8.10.3.3
Parameter Pt402 Range 0~800
Position mode, velocity mode
and torque mode
Default 800 Effective Immediately Unit 1%*
Description
Internal torque limit-torque limit value for forward direction
Table8.10.3.4
Parameter Pt403 Range 0~800
Position mode, velocity mode
and torque mode
Default 800 Effective Immediately Unit 1%*
Description
Internal torque limit-torque limit value for reverse direction
Table8.10.3.5
Parameter Pt415 Range 0~65535
Position mode, velocity mode
and torque mode
Default 0 Effective Immediately Unit 0.01 ms
Description
Set T-REF filter time constant.

 Loading...
Loading...


