E1 Series Servo Drive User Manual Application Function
8-64 HIWIN MIKROSYSTEM CORP.
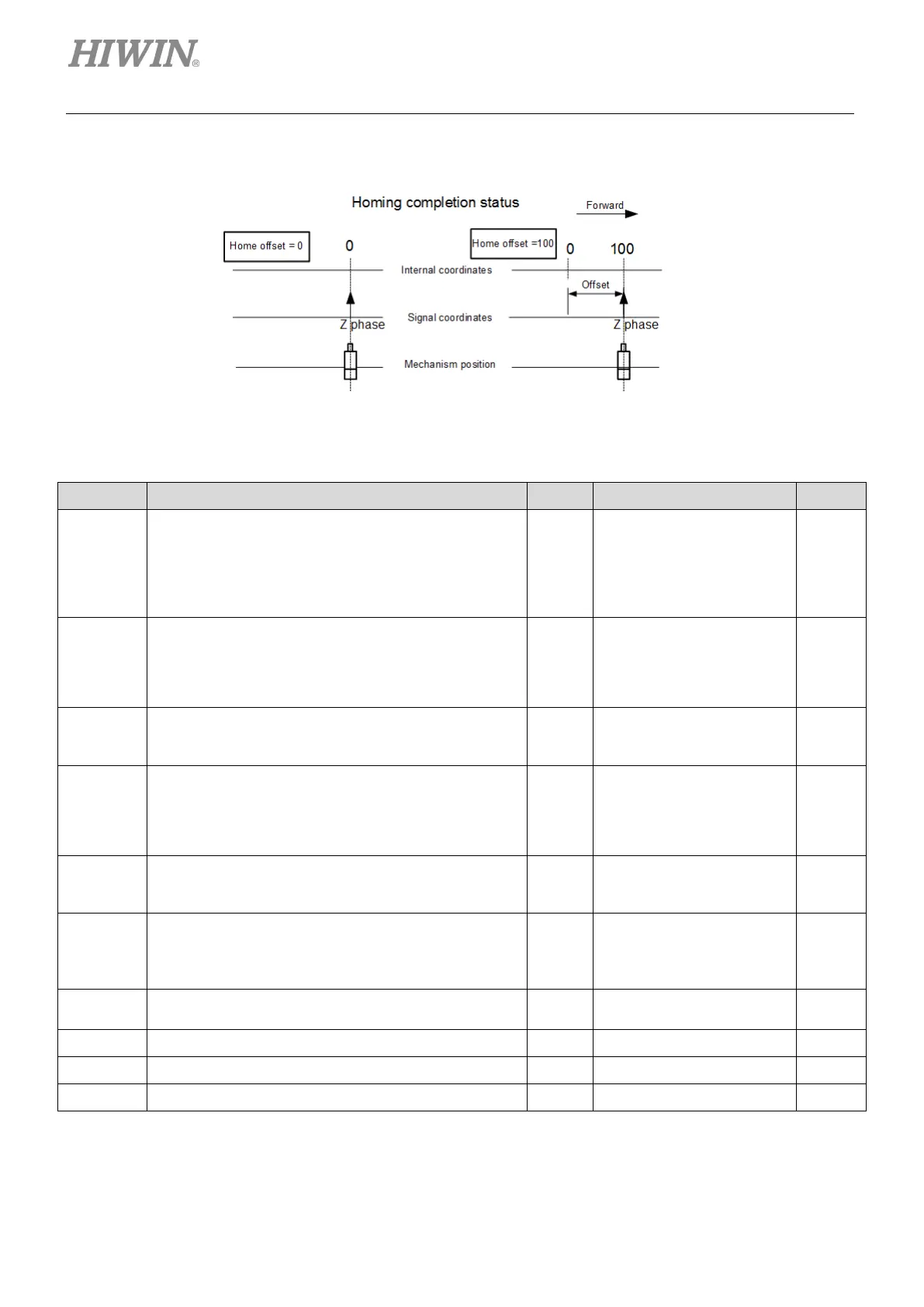
(2) Home offset: Home offset is used to adjust the position after homing completes.
Figure8.11.1.2 Description of home offset
Table8.11.1.1
Parameter Description Default Range Unit
Pt700
Set homing method. The servo drive provides 13
homing methods, but some of the homing methods
may not be available due to motor type and machine
condition. Users can only select from the 13 homing
methods. Other setting will be regarded as homing
1 -3~37
The
number
of
homing
method
Pt701
Set the velocity for finding near home sensor (rotary
servo motor). The applicable rotary servo motors are
servo motor and direct drive motor. Search for the
reference point of Z-
phase signal at fast homing
velocity.
20 0~3000 1 rpm
Pt705
Set the velocity for finding near home sensor (linear
servo motor)
. Search for the reference point of
Z-phase signal at fast homing velocity.
10 0~1000 1 mm/s
Pt702
Set the velocity for finding home position (rotary
servo motor). The applicable rotary servo motors are
servo motor and direct drive motor. Search for the
reference point of Z-phase signal at slow homing
6 0~3000 1 rpm
Pt706
Set the velocity for finding home position (linear
servo motor) Search for Z-
phase signal at slow
homing velocity.
3 0~1000 1 mm/s
Pt703
Set the time limit for homing procedure. If the time of
performing homing procedure exceeds the time limit,
it will be regarded as homing failure and homing
procedure will be stopped.
20 0~100 Second
Pt704
Set home offset. Adjust the position after homing
completes.
0 -1073741824~1073741824
Pt707 Homing acceleration time 100 2~10000 ms
Pt708 Homing deceleration time 100 2~10000 ms
Pt709 Homing emergency deceleration time 10 2~1000 ms
 Loading...
Loading...



