E1 Series Servo Drive User Manual Application Function
HIWIN MIKROSYSTEM CORP. 8-83
Step Contents Operation Parameter Command
Multiplier per one full-closed
4
Test run.
Item to check
Check if the servo
motor operates
normally in full-closed
check if the moving
distance is correct. While
performing P2P motion,
slowly increase the velocity
from low velocity to the
required velocity.
P2P motion and JOG in Test
run.
Servo drive
5
loop control.
Item to check
Check if the operation
(including the
controller) in
full-closed loop
from the controller and
check if full-closed loop
control is normal. Slowly
increase the velocity from
low velocity to the required
velocity.
N/A Controller
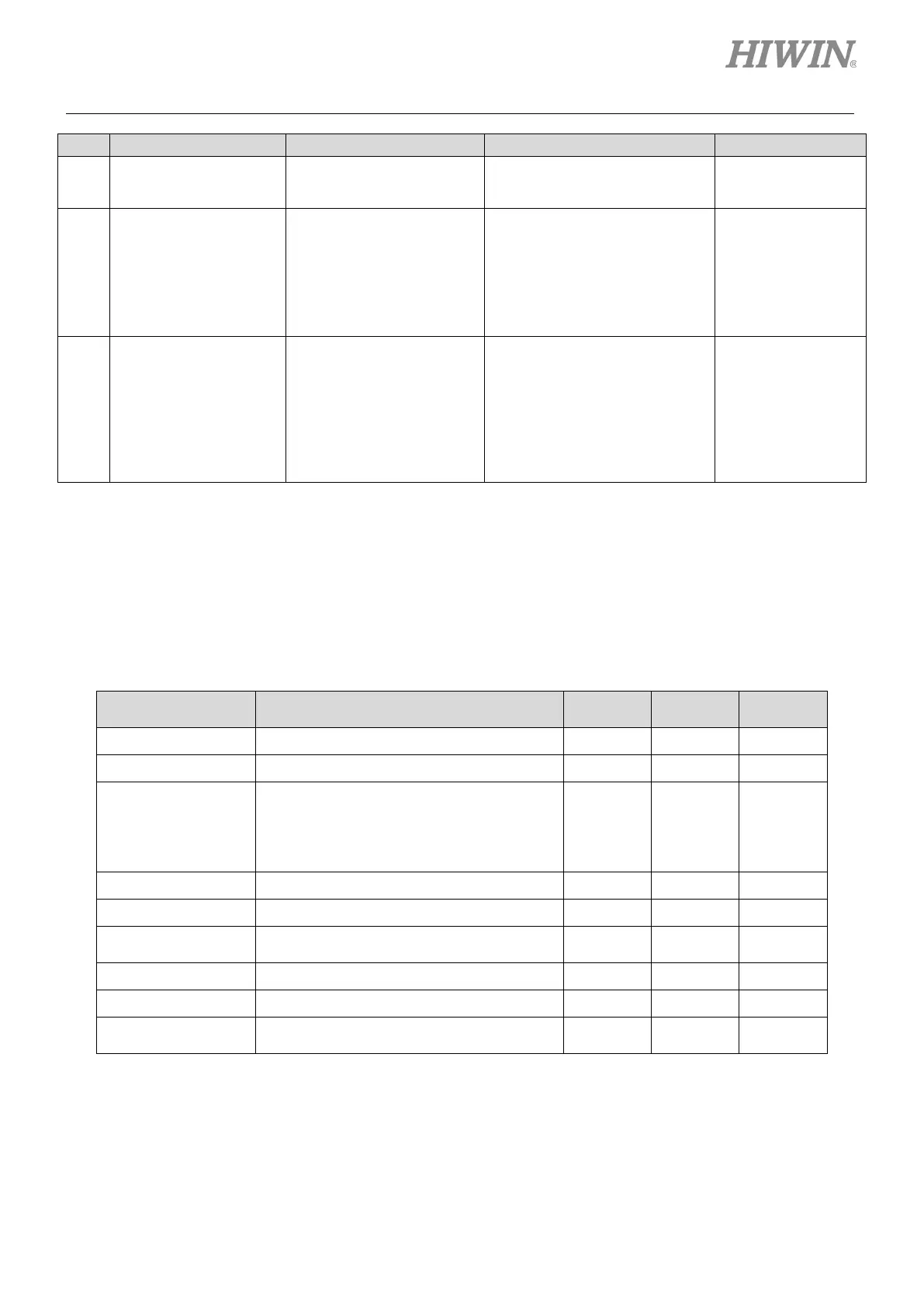
8.16.3 Parameter settings for full-closed loop control
The parameters used for full-closed loop control are described in table 8.16.3.1.
Table8.16.3.1
Parameter Contents
Pt000= t.X Rotation/movement direction selection V V V
Pt002= t.X Usage of external encoder V V V
Pt20A, Pt20B,
Pt20C, Pt20D
Feed length of external encoder, linear
unit length (resolution) of external
encoder, gear ratio at motor side
(full-closed loop), gear ratio at load side
V V V
Pt281 Encoder output resolution V V V
Pt20E, Pt210 Electronic gear ratio (numerator) V - -
Pt51B
Detection value for overflow motor-load
position deviation
V - -
Pt52A Multiplier per one full-closed loop rotation V - -
Pt006/Pt007 Analog monitor signal V V V
Pt22A= t.X
Velocity feedback selection during
full-closed loop control
V - -
 Loading...
Loading...



