E1 Series Servo Drive User Manual Trial Operation When Connected To Controller
HIWIN MIKROSYSTEM CORP. 9-9
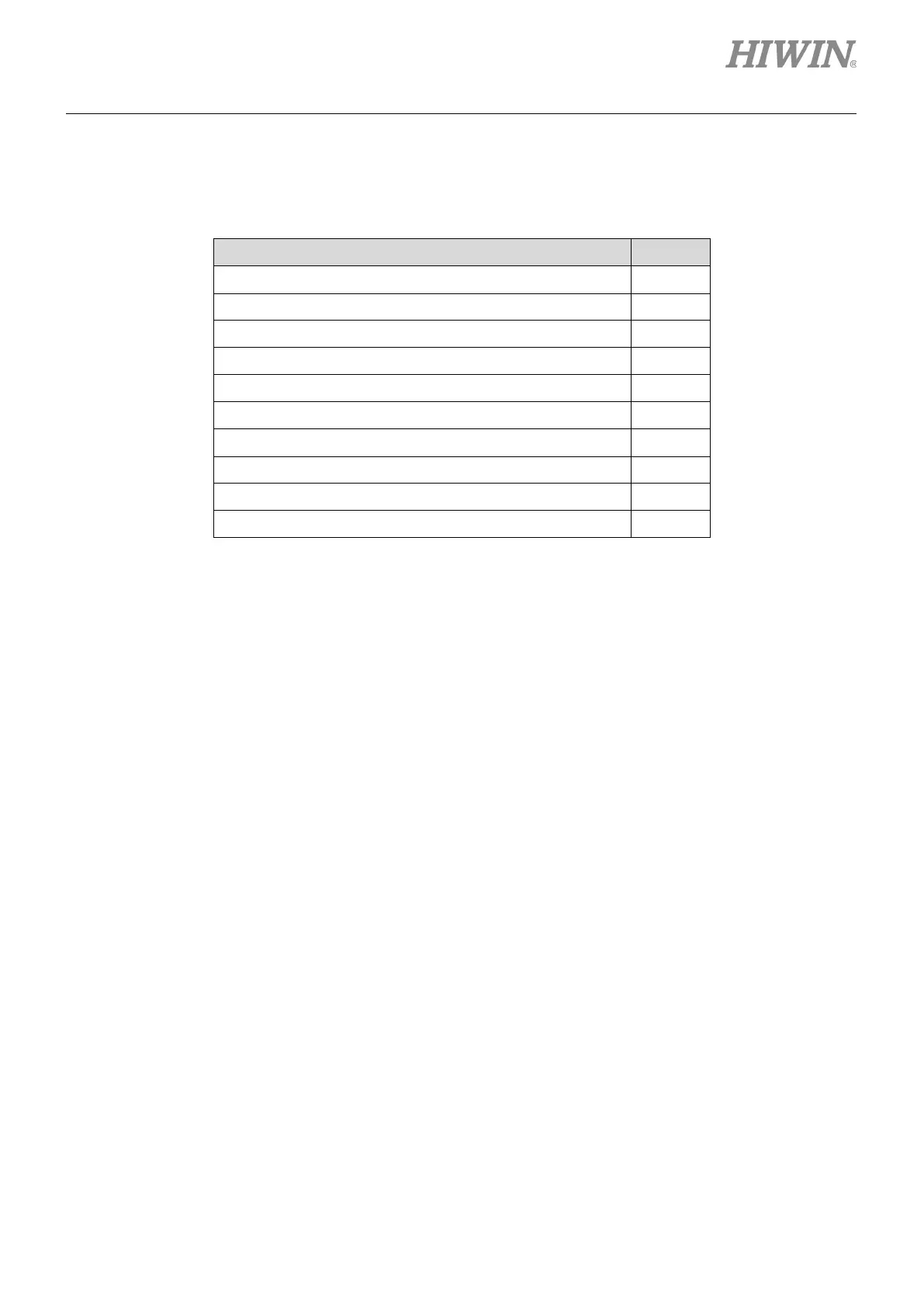
Step 2: Check the settings and states of input signals. The basic signals used in torque mode are listed
in table 9.4.1.1. The configuration can be user-defined.
Table9.4.1.1
Signal State
Servo on input (S-ON) signal OFF
Proportional control input (P-CON) signal OFF
Forward prohibition input (P-OT) signal OFF
Reverse prohibition input (N-OT) signal OFF
Alarm reset input (ALM-RST) signal OFF
Forward external torque limit input (P-CL) signal OFF
Reverse external torque limit input (N-CL) signal OFF
Servo drive built-in homing procedure input (HOM) signal OFF
Servo drive error map input (MAP) signal OFF
Forced stop input (FSTP) signal OFF
Step 3: Manually move the load to where the positive and negative limit switches (P-OT and N-OT)
locate to ensure the signals and the settings are correct.
Step 4: Set the torque command input (T-REF+, T-REF-voltage) from the controller to 0 V. Check the
rotation of the servo motor. If the servo motor rotates slightly, adjust offset till the motor stops
rotating.
Step 5: Input a constant-torque and low-torque command from the controller to operate the servo
motor.
Step 6: Check if the moving direction of the motor is correct. If the moving direction is different from the
command, change the setting by referring to section 6.6.
Step 7: Adjust torque command input from the controller and check if the command is in accordance
with the torque.
Step 8: Resume the torque command input from the controller to 0 V.
Step 9: Save the modified parameter settings. These parameter settings become effective after power
on.
Step 10: Turn off the power of the servo drive.

 Loading...
Loading...


