E1 Series Servo Drive User Manual Parameters
HIWIN MIKROSYSTEM CORP. 15-5
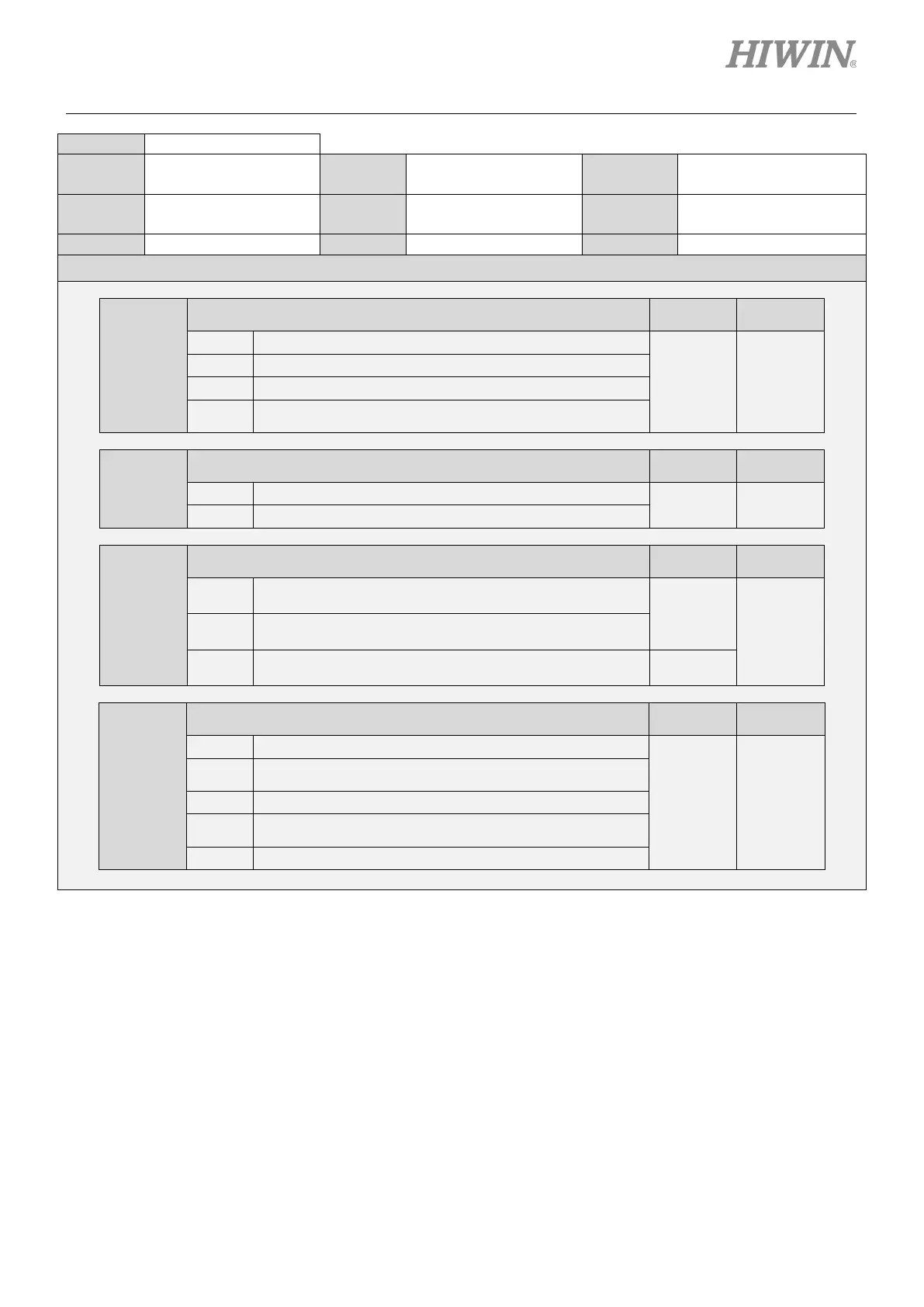
Size 2
0000~4213 Default 0000
Name
Application function
selection 2
Unit -
-
Description
t.X
Torque control selection (using T-REF signal)
Reference
0 Do not use T-REF signal.
All -
1 Use T-REF signal as external torque limit.
2 Use T-REF signal as torque feedforward input.
3
When P-CL or N-CL signal is ON, use T-REF signal as
external torque limit input.
t.X
Velocity/position control selection (using V-REF signal)
Reference
0 Do not use V-REF signal.
All -
1 Use V-REF signal as external velocity limit.
t.X
Usage of encoder
Reference
0
Use the encoder as a multi-turn absolute encoder. Battery is
required.
All
- 1
Use the encoder as an incremental encoder. Battery is not
required.
2
Use the multi-turn absolute encoder as a single-turn absolute
encoder. Battery is not required.
Rotary
t.X
Usage of external encoder
Reference
0 Do not use external encoder.
Rotary -
1
The external encoder moves in forward direction for motor
CCW rotation.
2 Reserved (Do not modify.)
3
The external encoder moves in reverse direction for motor
CCW rotation.
4 Reserved (Do not modify.)

 Loading...
Loading...


