HD2 Series Inverter Basic Operation Guidelines
-53-
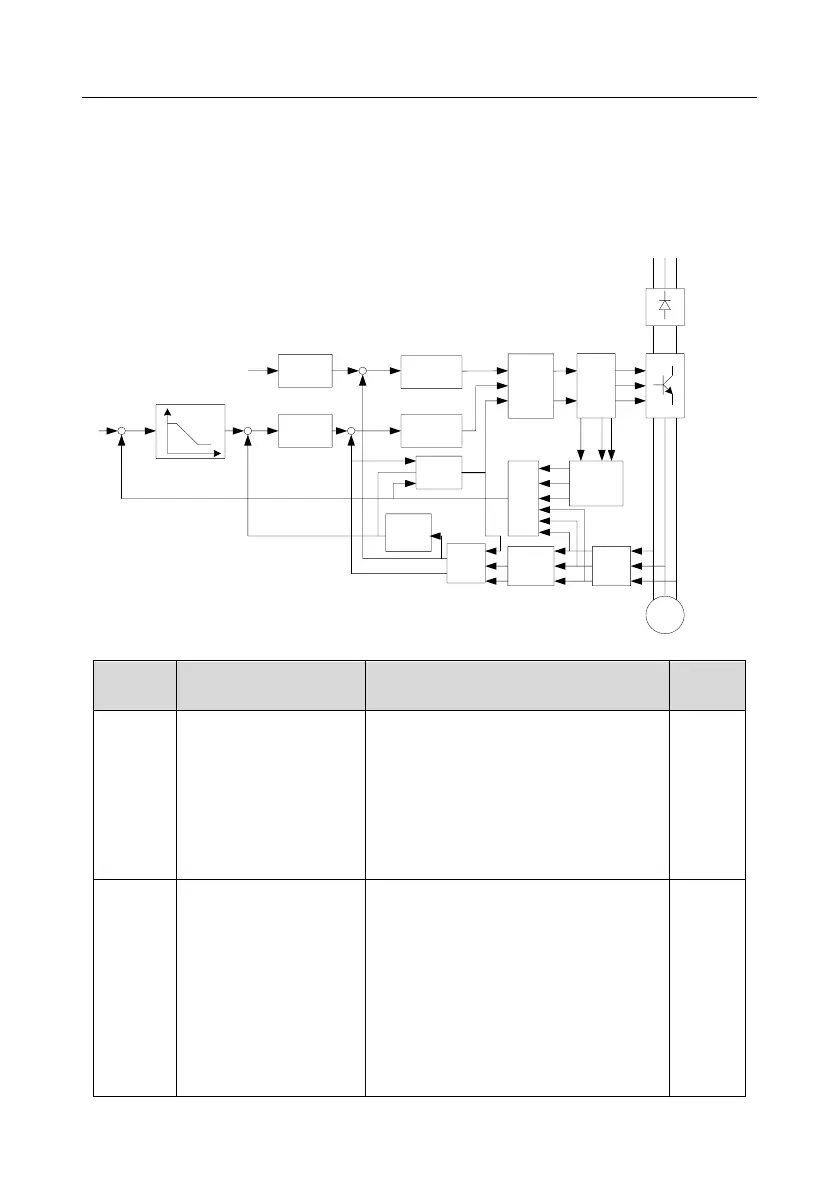
algorithm of vector control is based on accurate motor parameter model, the accuracy of motor
parameters will impact the control performance of vector control. It is recommended to input accurate
motor parameters and carry out motor parameter autotuning before vector operation.
As vector control algorithm is complicated, you should be cautious of regulation on dedicated function
parameters of vector control.
Calculate i
m
ACR
exciting
current
Flux linkage
observation
Current
detection
Position
observation
Speed
identific
ation
Voltage
detection
ACR
torque current
Calculate i
T
Park
conversion
PWM
pulse
Rectifier
bridge
IGBT
bridge
Motor
Park
conversio
n
Clark
conversion
φ
+
-
+
-
+
-
U
V
U
W
Uu
i
U
i
V
i
W
U
V
U
W
Uu
i
M
i
T
1w
r
1w
r
φ
i
T
R S T
0: Sensorless vector control (SVC) mode 0
1: SVC 1
2: Space voltage vector control mode
3: FVC
Note: To select 0, 1, or 3 as the control
mode, enable the inverter to perform motor
parameter autotuning first
Motor parameter
autotuning
0: No operation
1: Rotary autotuning 1; carry out
comprehensive motor parameter
autotuning; rotary autotuning is used in
cases where high control precision is
required.
2: Static autotuning 1 (comprehensive
autotuning); static autotuning 1 is used in
cases where the motor cannot be