HD2 Series Inverter Function Parameter List
-209-
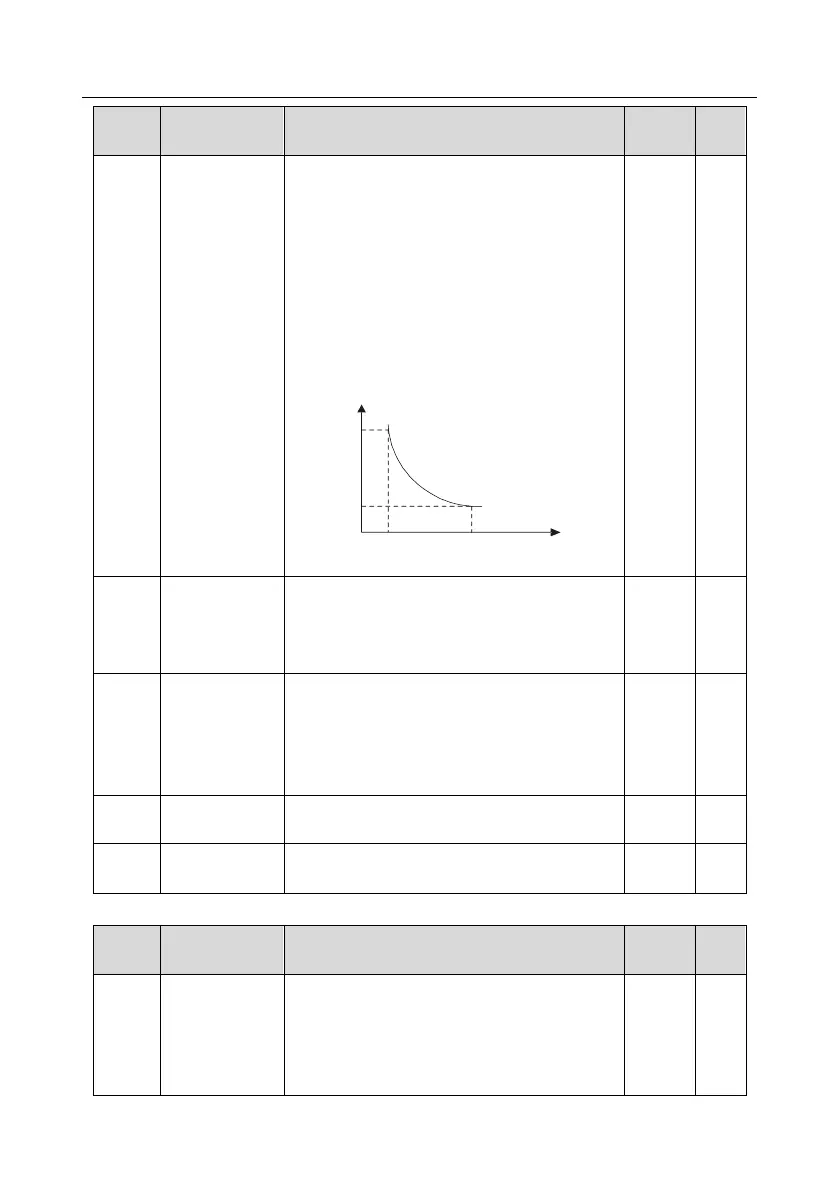
Overload
protection
coefficient of
motor 2
Motor overload multiples M = Iout/(In×K)
In is rated motor current, lout is inverter output
current, K is motor overload protection coefficient.
The smaller the K, the larger the value of M, the
easier the protection.
if M is 116%, protection will be applied when motor
overloads for 1h; if M is 200%, protection will be
applied when motor overloads for 60s; if M is no
less than 400%, protection will be applied
immediately.
1min
1h
116 % 200 %
Time t
Motor overload multiples
Setting range: 20.0%–120.0%
Power display
calibration
coefficient of
motor 2
Parameter
display of motor 2
0: Display based on the motor type; under this
mode, only parameters related to current motor
type will be displayed.
1: Display all; under this mode, all the parameters
will be displayed.
System inertia of
motor 2
P13––Control parameters of synchronous motor
Reduction rate of
the injection
current of
synchronous
motor
This parameter is used to set the reduction rate of
the input reactive current. When the active current
of the synchronous motor increases to some
extent, the input reactive current can be reduced to
improve the power factor of the motor.