HD2 Series Inverter Function Parameter List
-249-
Analog filter time
of rigid tapping
Max. frequency
of rigid tapping
Corresponding
frequency of
analog zero drift
of rigid tapping
P23––Vector control of motor 2
Speed loop
proportional gain
1
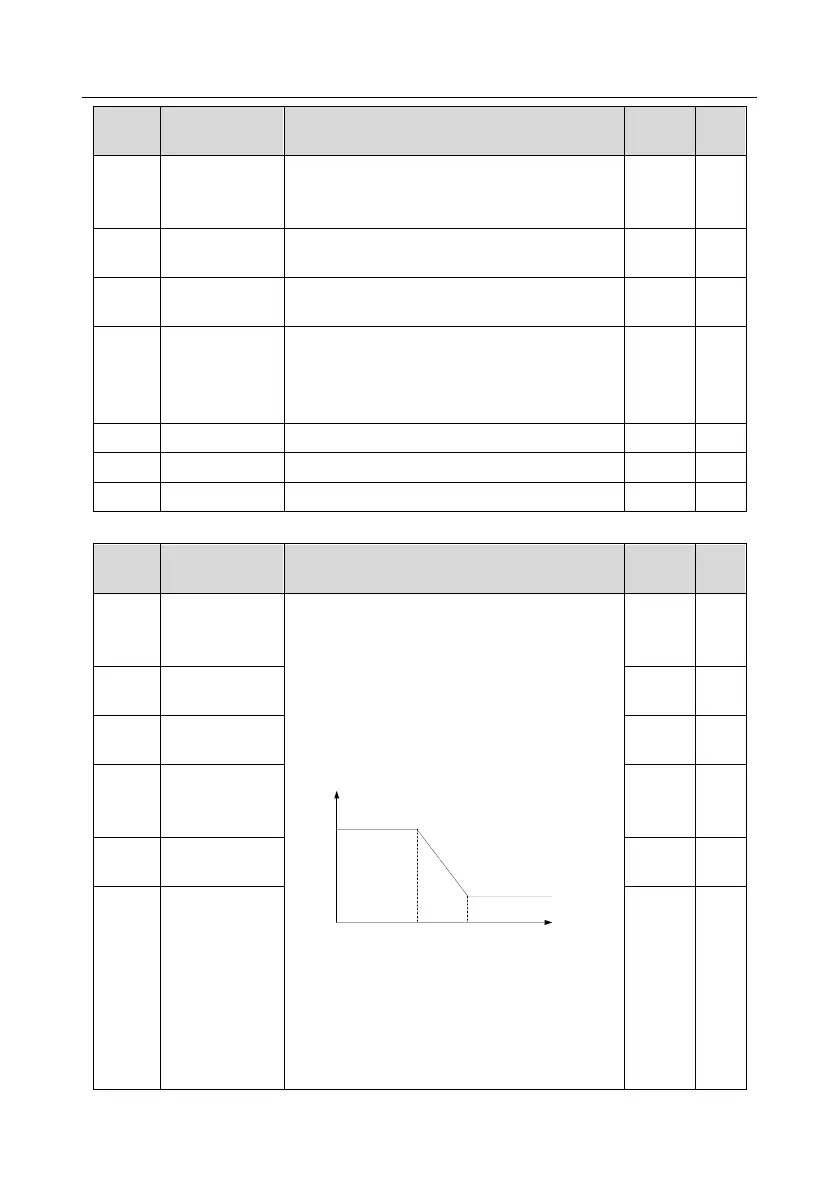
P23.00–P23.05 fit for vector control mode only.
Below switchover frequency 1 (P23.02), the speed
loop PI parameters are P23.00 and P23.01. Above
switchover frequency 2 (P23.05), the speed loop
PI parameters are P23.03 and P23.04; in between
them, the PI parameters are obtained by linear
variation between two groups of parameters, as
shown in the figure below.
PI parameters
Output frequency f
(P23.00,P23.01)
(P23.03,P23.04)
P23.02 P23.05
The speed loop dynamic response characteristics
of vector control can be adjusted by setting the
proportional coefficient and integral time of speed
regulator. Increase proportional gain or decrease
integral time can accelerate dynamic response of
speed loop, however, if the proportional gain is too
Speed loop
integral time 1
Switch over low
point frequency
Speed loop
proportional gain
2
Speed loop
integral time 2
Switch over high
point frequency