IS620P User Manual Chapter 6 Troubleshooting
- 117 -
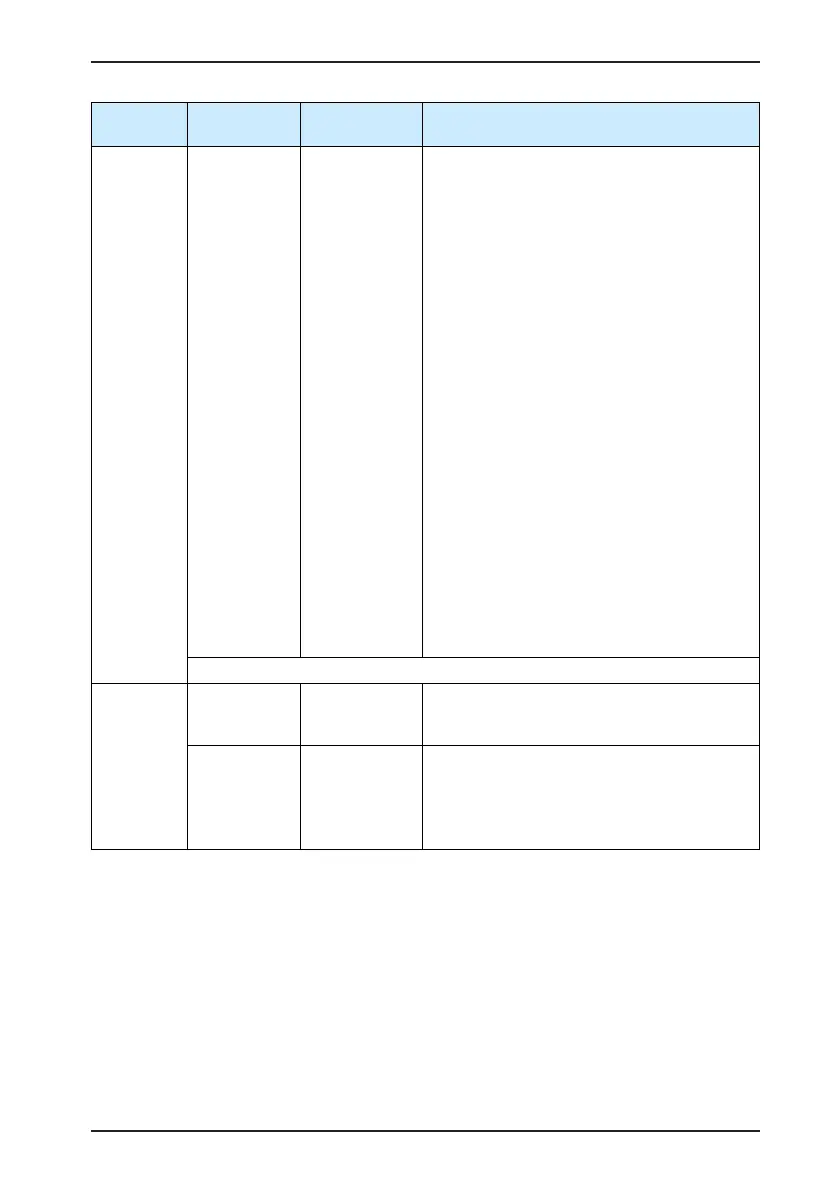
During
Startup
Fault
Phenomenon
Cause Conrming Method
Input the
speed
reference.
The servo
motor rotates
in the reverse
direction.
The speed
reference (H0B-
01) is negative.
•
When AI is selected to input the speed
reference, check whether the polarity of input
signal is reversed.
•
When digital setting is used to set the speed
reference, check whether H06-03 (keypad
setting value of speed reference) is smaller
than 0.
•
When multi-speed is used to set the speed
reference, check whether the speed references
in group H12 are positive or negative.
•
When communication is used to set the speed
reference, check whether H31-09 (speed
reference set via communication) is smaller
than 0.
•
When jog speed reference is used to set the
speed reference, check the value of H06-04
(jog speed setting value). Then check whether
the effective logic of DI functions FunIN.18:
JOGCMD+ (forward jog) and FunIN.19:
JOGCMD- (reverse jog) matches the predicted
rotating direction.
•
Check whether the DI function FunIN.26:
SpdDirSel (speed reference direction) has
been allocated and whether the logic of
corresponding DI is effective.
•
Check whether H02-02 is set correctly.
■ After the preceding causes are removed, the servo motor can rotate.
The servo
motor jitters
at low speed.
The motor
speed is not
steady.
The gain is set
unreasonably.
•
Perform automatic gain adjustment based on
section 4.5.2 Automatic Gain Adjustment.
The motor shaft
vibrates left and
right.
The load inertia
ratio ((H08-15) is
too large.
•
If the servo motor can run safely, perform the
inertia auto-tuning based on section 4.5.1
Inertia Auto-tuning.
•
Perform automatic gain adjustment based on
section 4.5.2 Automatic Gain Adjustment.

 Loading...
Loading...
