Chapter 6 Troubleshooting IS620P User Manual
- 152 -
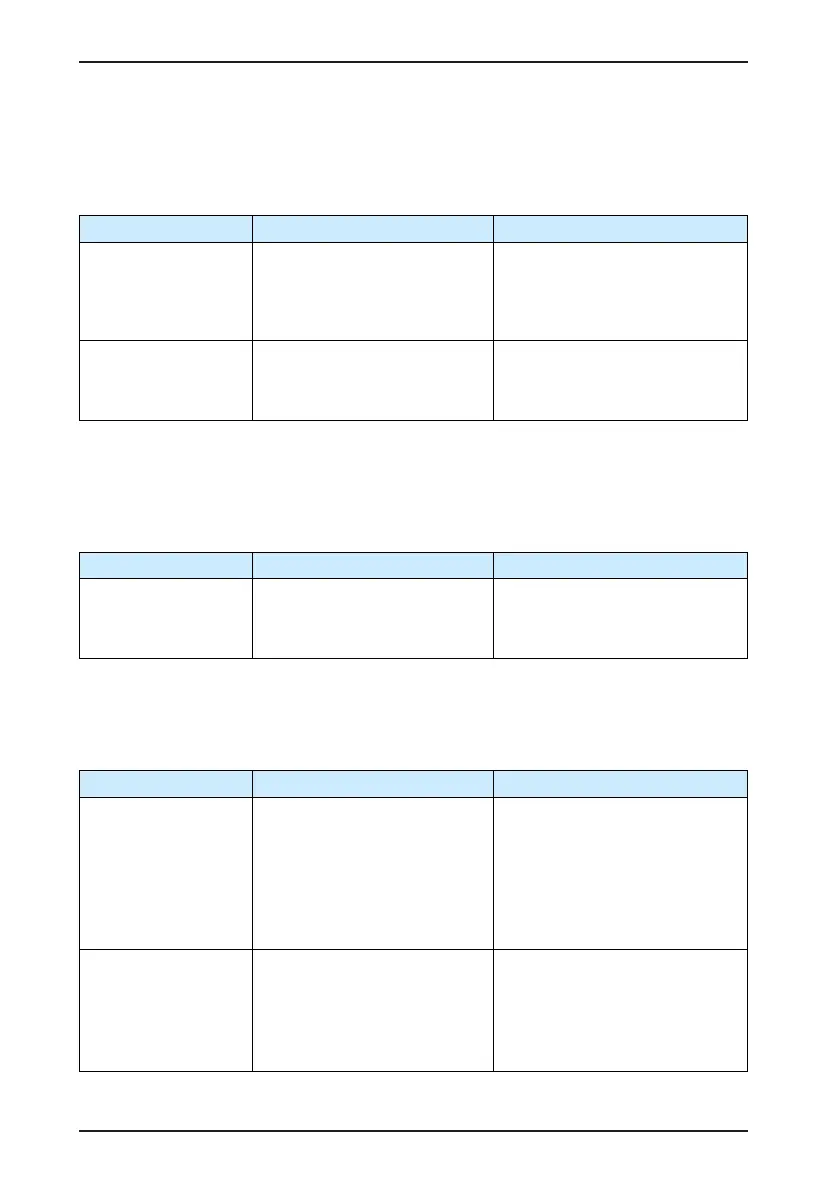
3. Er.831: Excessive AI zero drift
Cause:
When the input voltage of AI (AI1 and AI2) is 0 V, the sampling voltage of the servo drive is
greater than 500 mV.
Cause Conrming Method Corrective Action
1. The wiring is incorrect
or interference exists.
•
Check wiring based on correct
wiring diagram.
Re-wire the AI with a STP cable and
shorten the cable length.
Increase the AI lter time constant:
AI1 lter time constant: H03-51
AI2 lter time constant: H03-56
2.The servo drive is
faulty.
•
Disconnect the AI cable (the
input voltage is 0). Check
whether the AI sampling value
in group H0B exceeds 500 mV.
If the AI sampling value in group
H0B exceeds 500 mV, replace the
servo drive.
4. Er.900: DI emergency braking
Cause:
•
The logic of the DI (including external DI and virtual DI) allocated with function FunIN.34:
EmergencyStop (Braking) is effective.
Cause Conrming Method Corrective Action
The DI function
FunIN.34 is triggered.
•
Check whether the logic of
the DI allocated with function
FunIN.34: EmergencyStop
(Braking) is effective.
Check the running mode and clear
the DI braking enable signal.
5. Er.909: Motor overload
Cause:
The accumulative heat of the 60Z series 200 W and 400 W motor reaches the alarm level.
Cause Conrming Method Corrective Action
1. Wiring of the motor
and encoder is incorrect
or poor.
•
Check wirings between the
servo drive, servo motor and
encoder according to correct
wiring diagram.
Check wiring based on correct wiring
diagram.
Prefer to use the cable congured
by Inovance as standard.
When the self-made cable is
used, make and connect the cable
according to the hardware wiring
guidance.
2. The load is too heavy.
The motor keeps output
of effective torque
higher than the rated
torque for a long time.
•
Conrm the overload
characteristic of the servo drive
or servo motor.
•
Check whether the average
load rate (H0B-12) is greater
than 100.0% for long time.
Replace with a large servo drive and
matching servo motor.
Reduce the load and increase
acceleration/deceleration time.

 Loading...
Loading...
