IS620P User Manual Chapter 6 Troubleshooting
- 147 -
35. Er.B00: Position feedback error too large
Cause:
•
The position feedback error is greater than the setting value of H0A-10 in the position
control mode.
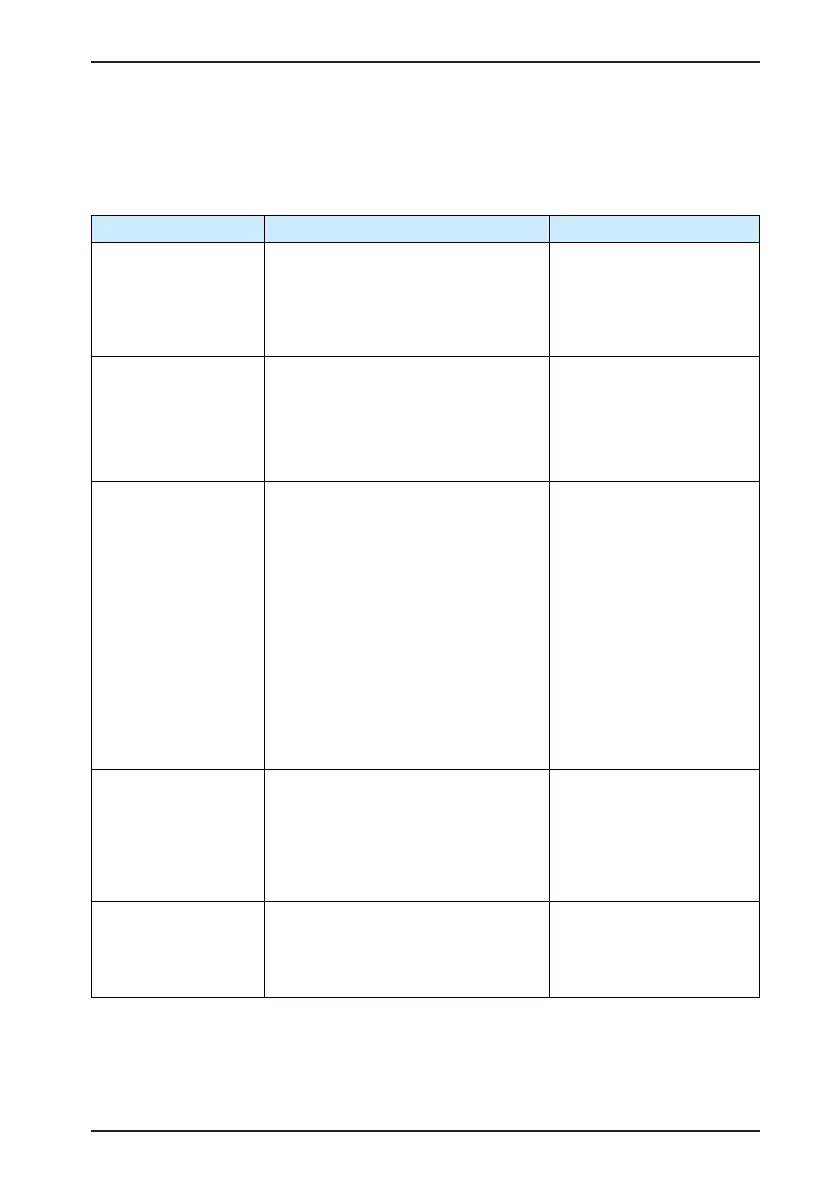
Cause Conrming Method Corrective Action
1. The servo motor
cables break or are
connected incorrectly.
•
Check whether the phase sequence
on the servo drive side is consistent
with that on the motor side.
•
Check whether the UVW cables are in
good contact.
Re-connect the servo motor
cables.
Keep the phase sequence
on the servo drive side
consistent with that on the
motor side.
2. The gain of the servo
drive is too low.
•
Check the servo drive position loop
gain and speed loop gain.
First speed loop gain: H08-00 to H08-
02
Second speed loop gain: H08-03 to
H08-05
Adjust the gain manually
or perform automatic gain
adjustment according to
section 4.5.2.
3. The input pulse
frequency is very high.
•
Check whether the input pulse
frequency is too high if the position
reference source is pulse reference.
•
The acceleration/deceleration time is 0
or too small.
•
Reduce the position
reference frequency or
decrease the electronic
gear ration
•
When host computer is
used to output position
pulses, set acceleration/
deceleration time in the
host computer.
•
If the host computer is not
allowed to set acceleration/
deceleration time, increase
parameters H05-04 and
H05-06 to smoothen
position reference.
4. Relative to the
running condition, the
position feedback error
is too large but H0A-10
(Threshold of position
deviation fault) is too
small.
•
Check whether H0A-10 is set too
small.
Increase the value of H0A-10.
5. The servo drive/motor
is faulty.
•
Monitor the running curve on the drive
debugging platform of Inovance:
Position reference, position feedback,
speed reference, torque reference
If the position reference is not
0, but the position feedback
is always 0, replace the servo
drive/motor.
 Loading...
Loading...

