IS620P User Manual Chapter 4 Running and Commissioning
- 93 -
•
The signal cables and power cables must be laid separately with the distance at least above 30
cm.
•
When the signal cable is not long enough and an extension cable needs to be connected, ensure
that the shield is connected reliably and the shielding and grounding are reliable.
•
+5V is referenced to GND, and +24V is referenced to COM-.
•
The current must not exceed the maximum allowable value. Otherwise, the servo drive cannot
work properly.
4.3.2 Function Code Setting of the Torque Control Mode
1. Torque reference input setting
a. Torque reference source
In the torque control mode, there are two torque reference sources, source A and source B,
set as follows:
•
Digital setting is performed on the keypad, and the percentage of the torque relative to the
rated torque set in H07-03 is used as the torque reference.
•
The analog setting means that the externally input analog voltage signal is converted to
the torque reference signal of motor speed. The relationship between the analog and the
torque reference can be dened based on actual requirements.
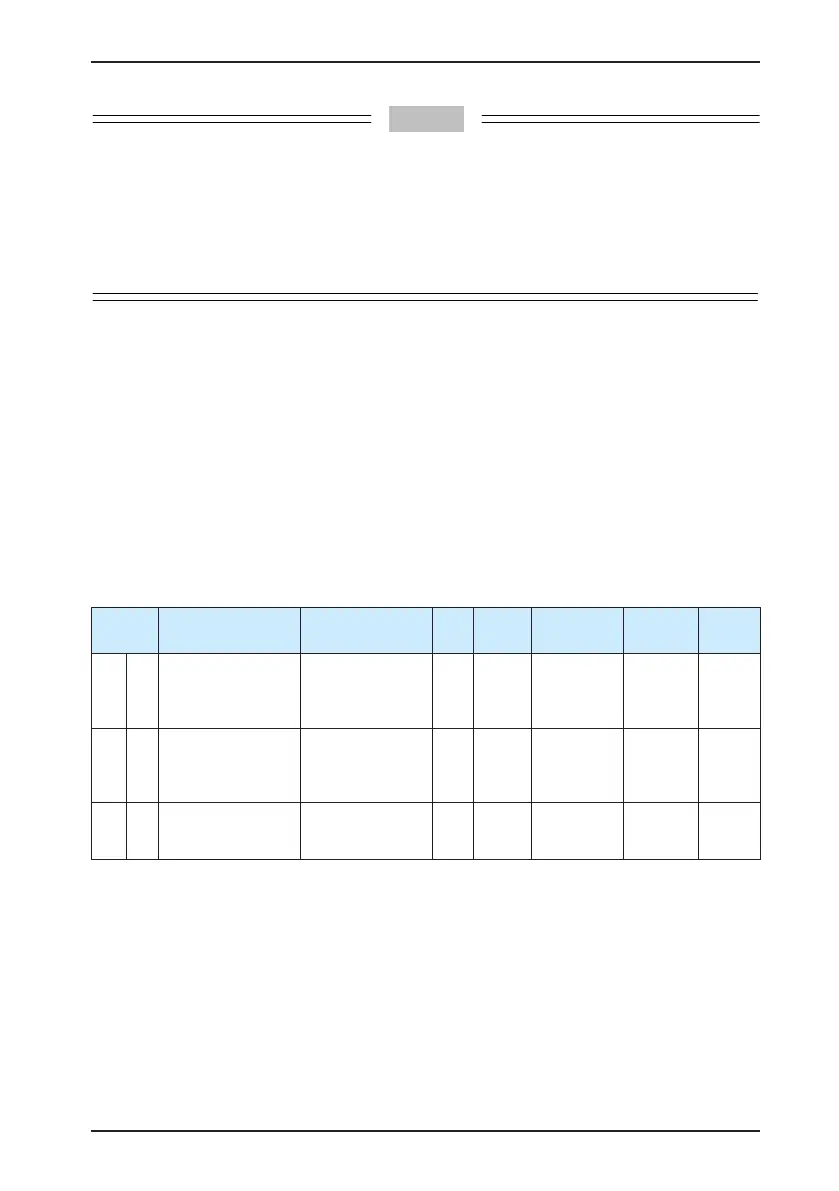
The related function codes are set in the following table.
Function
Code
Parameter Name Setting Range Unit Default
Effective
Time
Property
Control
Mode
H07 00
Main torque
reference A source
0: Digital setting
(H07-03)
1: AI1
2: AI2
- 0 Immediate At stop T
H07 01
Auxiliary torque
reference B source
0: Digital setting
(H07-03)
1: AI1
2: AI2
1 Immediate At stop T
H07 03
Keypad setting
value of torque
reference
-300.0 to 300.0 % 0.0 Immediate
During
running
T

 Loading...
Loading...
