IS620P User Manual Chapter 6 Troubleshooting
- 131 -
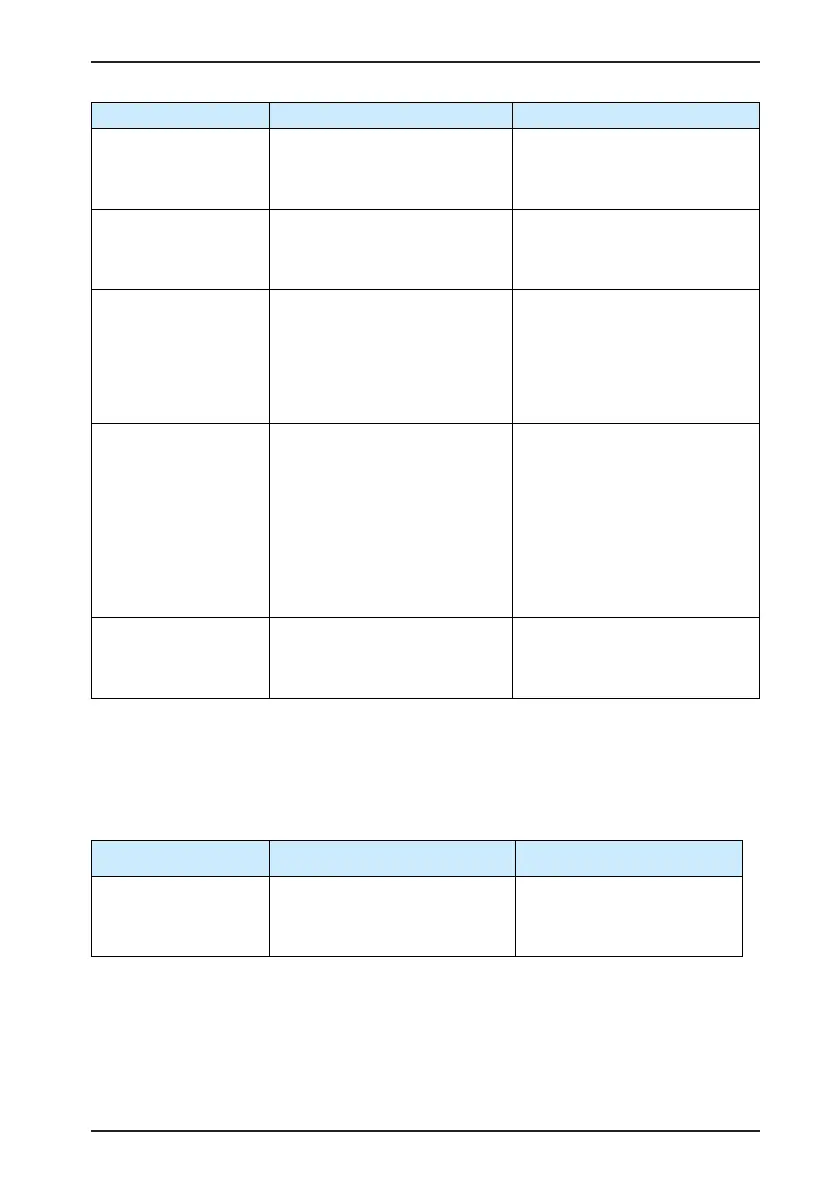
Cause Conrming Method Corrective Action
5. The motor UVW
cables are short
circuited.
•
Disconnect the motor cables
and check whether the motor
UVW cables are short circuited
and whether glitch occurs.
Connect the motor cables correctly.
6.The motor is damaged.
•
Disconnect the motor cables
and measure whether resistance
between the motor cables UVW
is balanced.
Replace the motor if the resistance
is unbalanced.
7. The gain setting is
improper and the motor
oscillates.
•
Check whether the motor
oscillates or generates a shrill
noise during motor startup
and running. You can view the
current feedback by using the
drive debugging platform of
Inovance.
Adjust the gain by referring to
chapter 4.
8. The encoder cable
is incorrectly wired,
corrosive, or connected
loosely.
•
Check whether the cable you
use is standard conguration
of Inovance and whether the
cable is aging, corrosive or is
connected loosely.
•
Set the servo enabled signal to
OFF and rotate the motor shaft
manually. Check whether H0B-
10 (rotation angle) changes as
the motor rotates.
Re-weld, fasten or replace the
encoder cable.
9. The servo drive is
faulty.
•
The fault remains after the
motor cables are disconnected
and the servo drive is powered
on again.
Replace the servo drive.
13. Er.207: Shaft D/Q current overow
Cause:
•
Abnormal current feedback results in overow of the internal register of the servo drive.
•
Abnormal encoder feedback results in overow of the internal register of the servo drive.
Cause Conrming Method Corrective Action
1. Shaft D/Q current
overow
•
If the fault remains after the drive
is powered off and powered on
again several times, the servo
drive is faulty.
Replace the servo drive.
 Loading...
Loading...

