IS620P User Manual Chapter 6 Troubleshooting
- 141 -
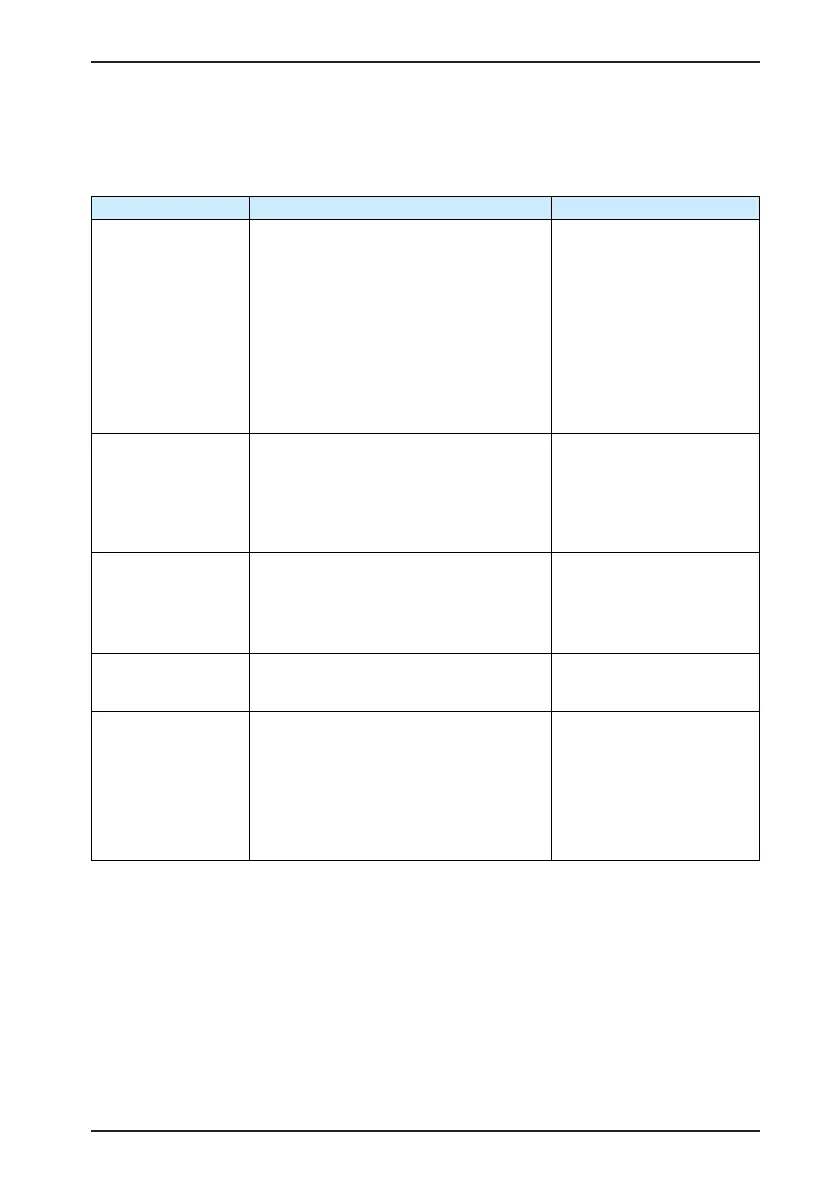
26. Er.620: Motor overload
Cause:
•
The heat accumulation of the servo drive reaches the fault level.
Cause Conrming Method Corrective Action
1. Wiring of the
motor and encoder is
incorrect or poor.
•
Check wirings between the servo drive,
servo motor and encoder according to
correct wiring diagram.
•
Check wiring based on
correct wiring diagram.
•
Prefer to use the cable
congured by Inovance as
standard.
•
When the self-made cable
is used, make and connect
the cable according to the
hardware wiring guidance.
2. The load is too
heavy. The motor
keeps output of
effective torque higher
than the rated torque
for a long time.
•
Conrm the overload characteristic of the
servo drive or servo motor.
•
Check whether the average load rate
(H0B-12) is greater than 100.0% for long
time.
•
Replace with a large servo
drive and matching servo
motor.
•
Reduce the load and
increase acceleration/
deceleration time.
3. The acceleration/
deceleration is too
frequent or the load
inertia is too large.
•
Calculate the load inertia ratio or perform
the load inertia ratio auto-tuning. Then
view H08-15 (load inertia ratio).
•
Conform the single running cycle when
the servo motor runs in circular.
Increase acceleration/
deceleration time during
single running.
4. The gain is
improper, causing too
high rigidity.
•
Observe whether the motor vibrates and
generates noise during running.
Adjust the gain by referring to
chapter 4.
5. The servo drive or
motor model is set
incorrectly.
•
For IS620P series products, view the bus
motor model in H00-05 and the servo
drive model in H01-02.
•
For the IS600P series product, view the
servo motor model in H00-00 and the
servo drive model in H01-02.
View the servo drive
nameplate and set the
servo drive model (H01-
02) correctly and replace
with matching servo motor
according to section 1.2
Servo System Conguration.
 Loading...
Loading...

