IS620P User Manual Chapter 6 Troubleshooting
- 129 -
10. Er.136: Data check error or no parameter stored in the motor ROM
Cause:
•
When the servo drive reads parameters from the encoder ROM, it nds that no parameters
are saved there or the parameter value is inconsistent with the agreed value.
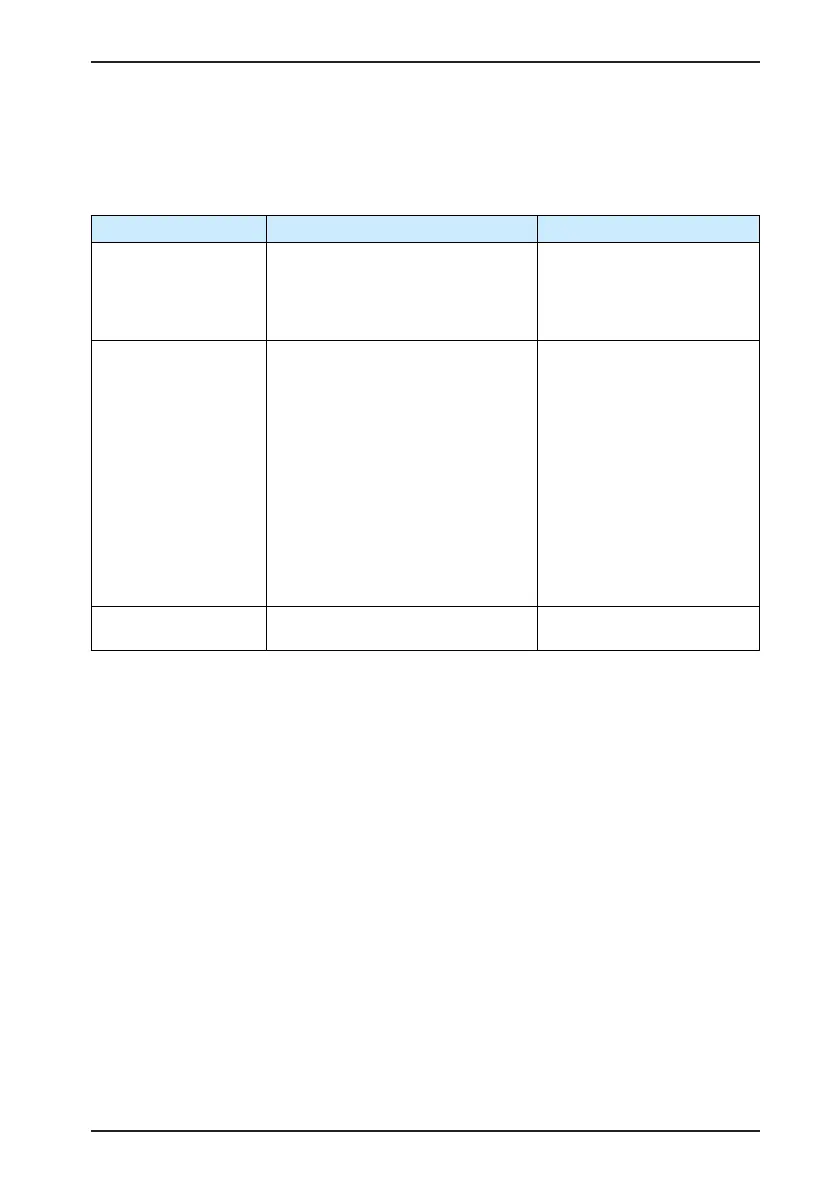
Cause Conrming Method Corrective Action
1. The servo drive model
and the motor model do
not match.
•
View the servo drive and motor
nameplates and check that the
equipment you are using is the
IS620P series servo drive and 20-bit
servo motor (-U2***) of Inovance.
Replace the unmatched servo
drive or motor. If you use the
IS620P series servo drive and
20-bit servo motor of Inovance,
ensure that H00-00 = 14000.
2. A parameter check
error occurs or no
parameter is stored in
the serial encoder ROM
memory.
•
Check whether the cable you use is
standard conguration of Inovance.
For the cable specication, refer to
Chapter 3 Wiring of Servo System.
The cable must not scratch, break or
be in poor contact. The cable must
be connected reliably.
•
Measure the signals PS+, PS-
, +5V and GND at both ends of
the encoder cable and observe
whether the signals at both ends are
consistent. For denition of signals,
see Chapter 3 Wiring of Servo
System.
•
Ensure that you use the
encoder cable congured by
Inovance as standard.
•
Ensure that the cable is
connected to the motor
securely and tighten the
screw on the drive side.
If necessary, use a new
encoder cable.
•
Never bundle the encoder
cable and power cables (R/
S /T, UVW). Connect them
separately.
3. The servo drive is
faulty.
•
The fault remains after the servo
drive is powered on again.
Replace the servo drive.
11. Er.200: Overcurrent 1
Cause:
•
Any phase feedback current is larger than the overcurrent level of the servo drive.

 Loading...
Loading...
