Chapter 7 Function Code Table IS620P User Manual
- 162 -
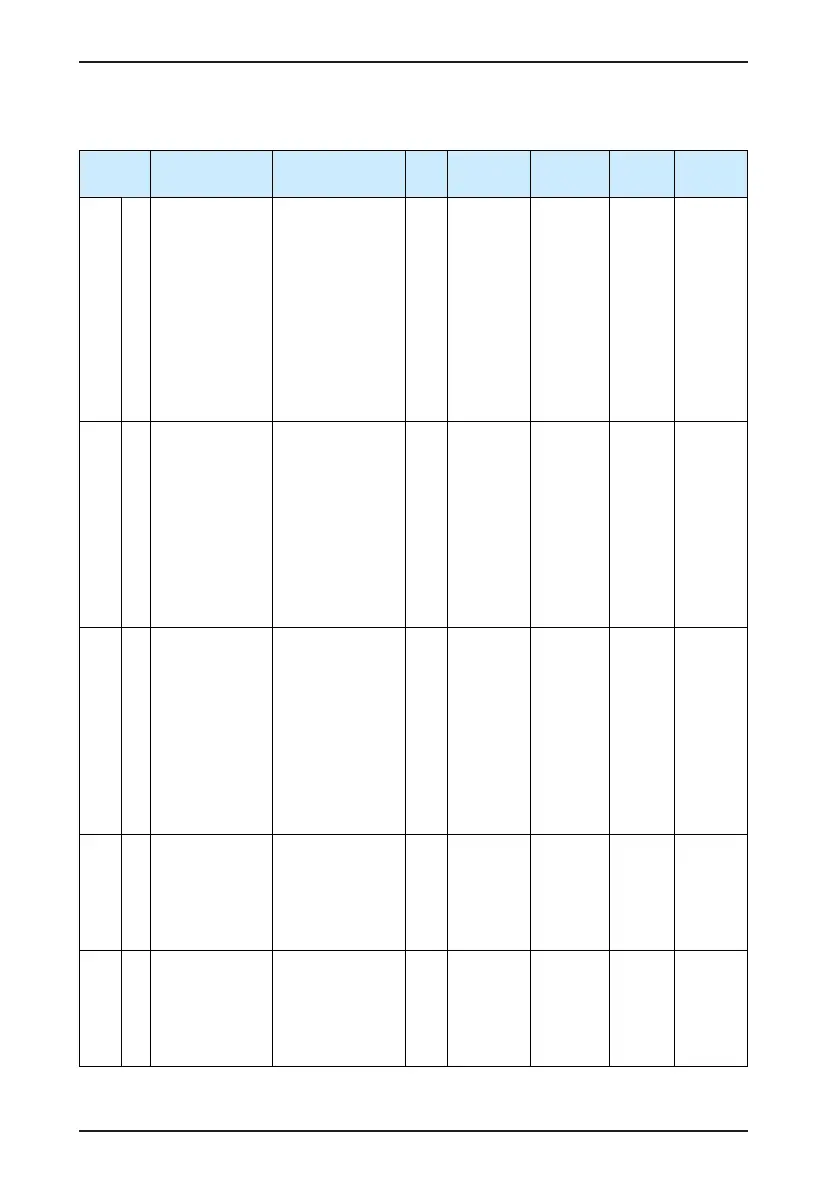
Group H02: Basic Control Parameters
Function
Code
Parameter Name Setting Range Unit Default
Effective
Time
Property
Control
Mode
H02 00 Control mode
0: Speed mode
1: Position mode
2: Torque mode
3: Torque mode ↔
Speed mode
4: Speed mode ↔
Position mode
5: Torque mode ↔
Position mode
6: Position mode
↔ Speed mode ↔
Torque mode
- 1 Immediate At stop -
H02 02 Rotating direction
0: CCW direction
as the forward
direction (phase A
advancing phase
B)
1: CW direction
as the forward
direction (reverse
rotation mode,
phase A lagging
phase B)
- 0
Power-on
again
At stop PST
H02 03
Output pulse
phase
0: CCW direction
as the forward
direction (phase A
advancing phase
B)
1: CW direction
as the forward
direction (reverse
rotation mode,
phase A lagging
phase B)
- 0
Power-on
again
At stop PST
H02 05
Stop mode at
servo drive
disabled
0: Coast to stop,
keeping free
running state
1: Stop at zero
speed, keeping
free running state
- 0 Immediate At stop PST
H02 06
Stop mode 2 at
fault
0: Coast to stop,
keeping free
running state
1: Stop at zero
speed, keeping
free running state
- 0 Immediate At stop PST

 Loading...
Loading...
