Chapter 4 Running and Commissioning IS620P User Manual
- 80 -
3. Position reference lter
The input position references are ltered to make rotation of the servo motor smoother. This
function has obvious effects in the following scenarios:
•
Acceleration/deceleration processing is not performed on the reference pulses output by
the host controller and the acceleration/deceleration rate is large.
•
The pulse frequency is too low.
•
The electronic gear ratio is larger than 10.
This function has no effect on the displacement (total pulses of position references).
The parameter setting for the position reference lter is as follows:
Function
Code
Parameter Name Setting Range Unit Default
Effective
Time
Property
Control
Mode
H05 04
First-order low-pass
lter time constant
0.0–6553.5 ms 0.0 Immediate At stop P
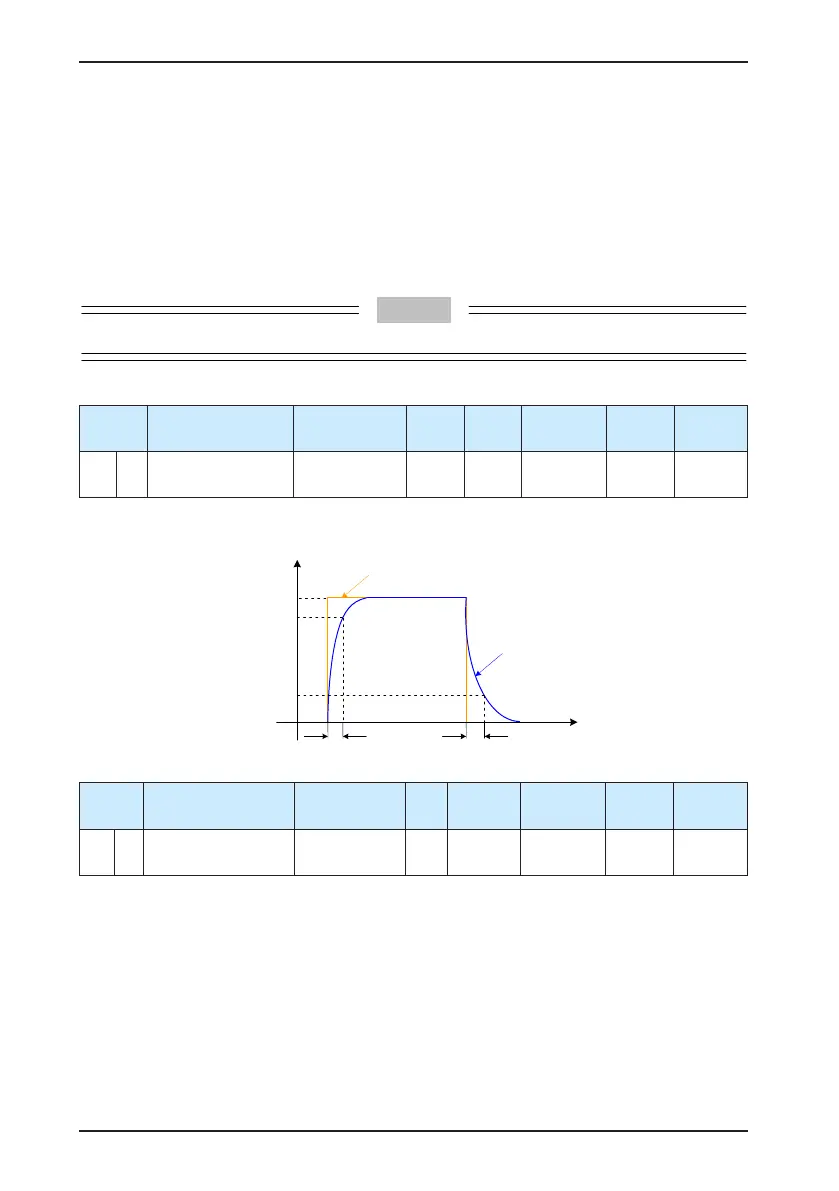
Figure 4-4 Example of rst-order low-pass lter
Position
reference
Time (T)
Low-pass filter time
P
P x 0.632
P x 0.368
Reference
before filter
Reference
after filter
Low-pass filter time
05-04
H
05-04
H
Function
Code
Parameter Name Setting Range Unit Default
Effective
Time
Property
Control
Mode
H05 06
Average lter time of
position references
0.0–128.0 ms 0.0 Immediate At stop P
When H05-06 = 0, the average lter is invalid.
 Loading...
Loading...

