D3-DU 3xx/A, /BSystem-wide error response characteristics
Project engineering manual V1.09
134
© KEBA 2021
16 System-wide error response characteristics
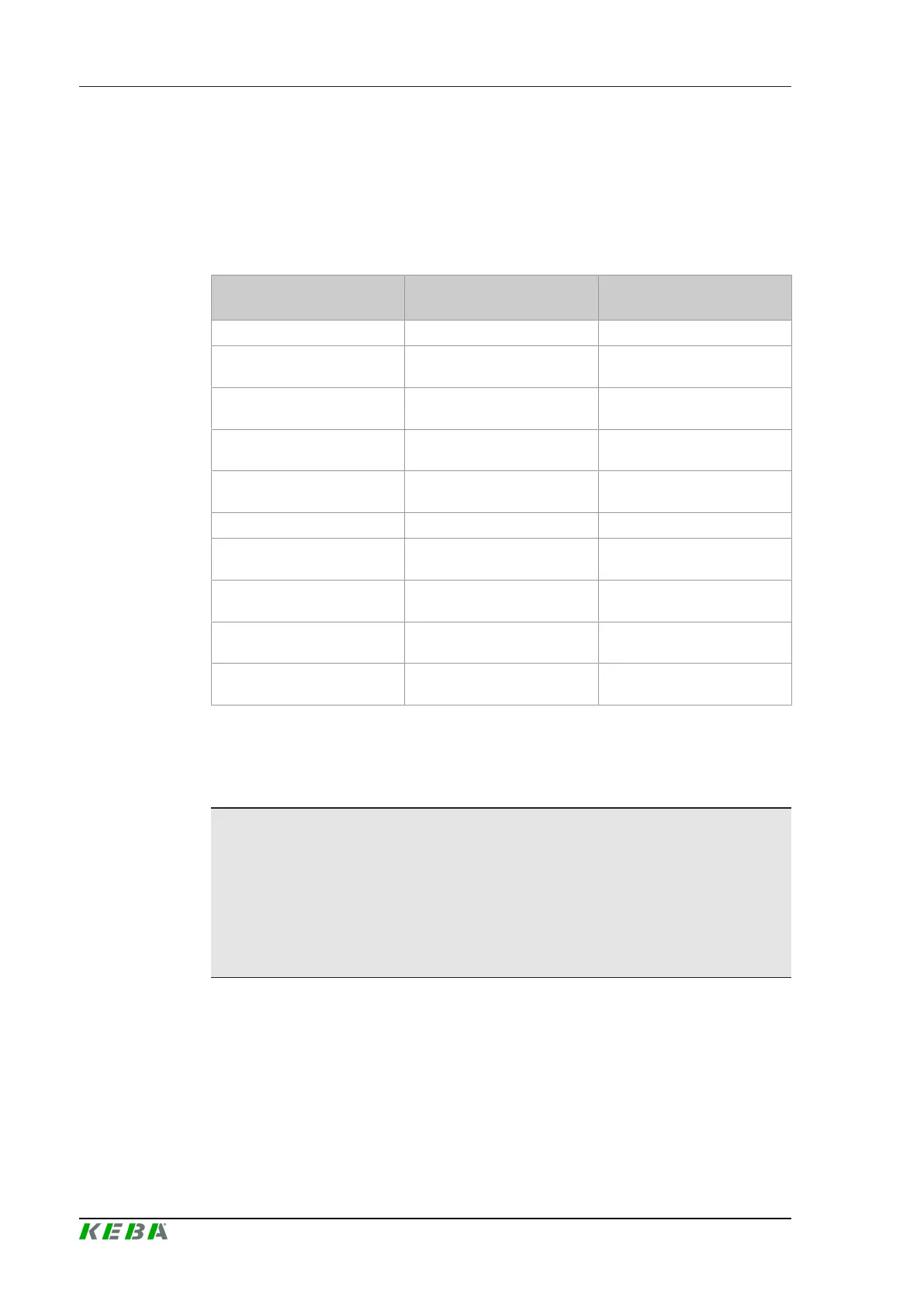
The following table gives an overview on how an alarm state of a bus com-
ponent or a bus interruption of a device affects the status of DU 3xx/x.
For the effects of the status of the safety control on the remaining system
components, see "Functional Safety Manual", chapter KEBA safety control"
Error in FSoE-slave
module
Response safety control
FW 2.0.0.3 / 2.0.0.9
Response safety control
FW 2.1.100
SMM (Fatal error) Alarm / RunIntern
1)
Alarm / RunIntern
1)
SMM (Alarm e.g. encoder er-
ror
Run Run
EL1904 (Internal error, FSoE
off)
Alarm / RunIntern
1)
Alarm / RunIntern
1)
EL1904 (External cross cir-
cuit error)
Run Alarm / RunIntern
1)
EL2904 (Internal error, FSoE
off)
Alarm / RunIntern
1)
Alarm / RunIntern
1)
EL2904 (Output error) Run Alarm / RunIntern
1)
EL1918 (Internal error, FSoE
off)
-
2)
Alarm / RunIntern
1)
EL1918 (External cross cir-
cuit error)
-
2)
Alarm / RunIntern
1)
EP1908 (Internal error, FSoE
off)
-
2)
Alarm / RunIntern
1)
EP1908 (External cross cir-
cuit error)
-
2)
Alarm / RunIntern
1)
1)
depending on "FSoE No Alarm". If there is an alarm, the system normally
changes to RunIntern after an alarm reset.
2)
not available
Safety information
In the event of a fault, simultaneous activation of STO and brakes by the
system is not automatically guaranteed. Alarms of the safe encoder box do
not automatically lead to an alarm of the safety control. This can cause mo-
tors to rotate against closed brakes. It is strongly recommended to ensure
that STO and brakes are activated simultaneously in the functional or safe
application (e.g. by using the ECS module).
 Loading...
Loading...
