Setting up Compax3
C3I12T11
192-120113 N08 C3I12T11 - December 2010
4.1.13. Position mode in reset operation
In this chapter you can read about:
Examples in the help file ................................................................................................140
In reset operation (activated by the configured reset distance), additional
positioning functions are possible for absolute positionings (can be set under
configuration in the “Positioning options / positioning profiles” window only in bus
mode “Positioning” or “Profile selection”):
All directions Standard positioning mode
Positive direction Positioning only in positive direction
Shortest path Positioning on the shortest path
Negative direction Positioning only in negative direction
Actual direction Positioning by keeping the actual direction of travel
Dynamic positioning
In dynamic positioning, a decision concerning the positioning travel is not taken on
the basis of the actual position, but on the basis of the braking position resulting
from the motion parameters.
In the event of positioning specifications below zero and higher than or
equal to the reset distance, this function is deactivated.
The positioning target must for instance be in the range between 0..359.999999°
for a reset distance of 360°.
The positioning functions are neither effective in test movements nor in an
automatic positioning after homing travel (if this was not deactivated in the
configuration).
In the event of “shortest path”, the motion is not defined for a positioning by a
travel of half the reset distance.
4.1.13.1 Examples in the help file
In the help file you can find examples for the functioning of the individual
positioning modes.
4.1.14. Defining the STOP function
The function “no STOP” is configurable.
No Stop: Input I1 and M.I6 resp. CW.1 and CW.14
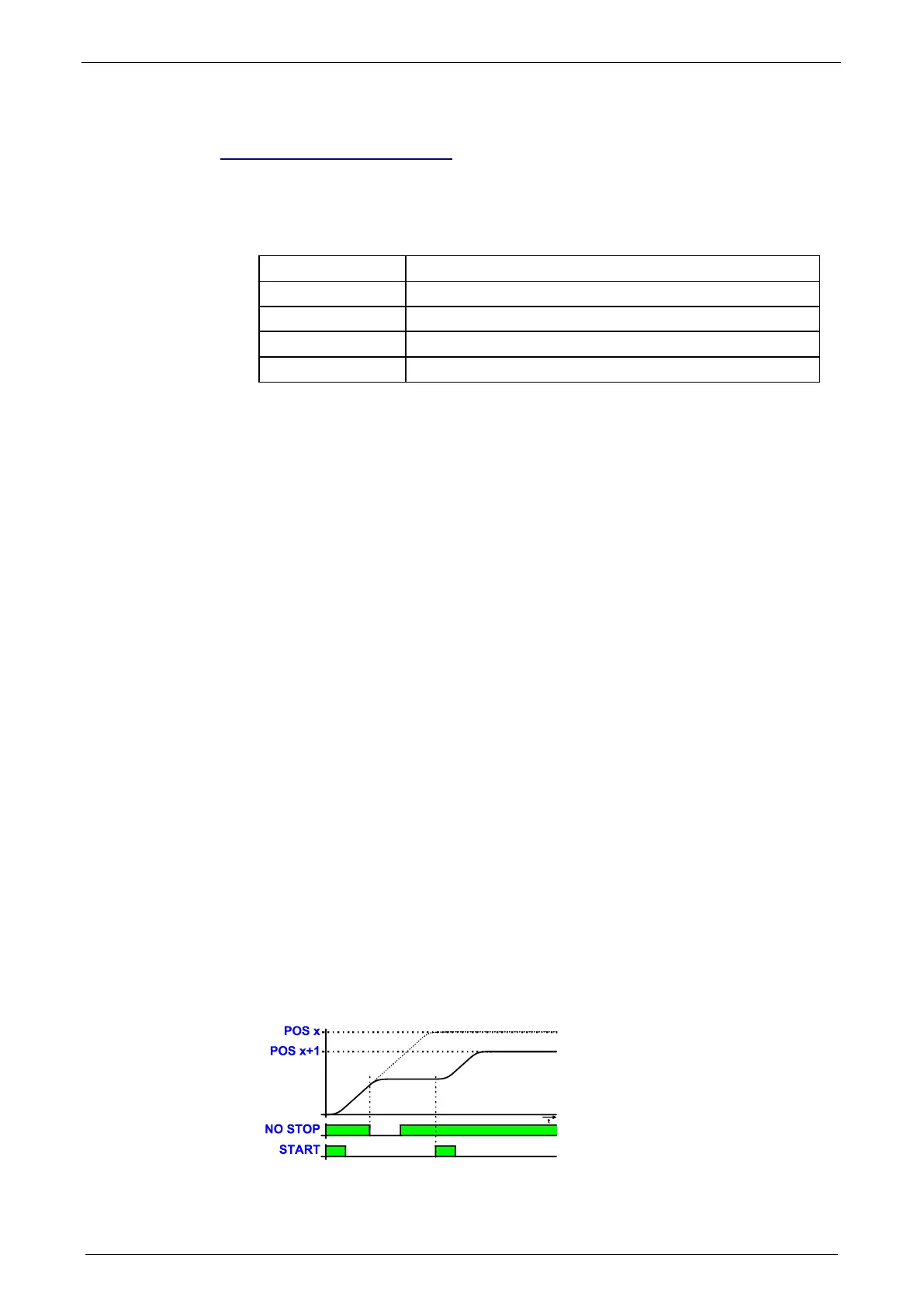
STOP and terminate the current positioning
A new START does not continue the positioning at the interruption point.
The motion set address is read in new and the motion set is executed completely.
Example: before the new START the motion set address "Pos x+1” was created.
NO STOP: no STOP
START: START signal (on edge)