Setting up Compax3
C3I12T11
192-120113 N08 C3I12T11 - December 2010
4.1.7. Defining the reference system
The reference system for positioning is defined by:
a unit,
the travel distance per motor revolution,
a machine zero point with true zero,
positive and negative end limits.
4.1.7.1 Measure reference
In this chapter you can read about:
You can select from among the following for the unit:
mm,
increments *
angle degrees or
Inch.
The unit of measure is always [mm] for linear motors.
*
The unit "increments" is valid only for position values!
Speed, acceleration and jerk are specified in this case in revolutions/s,
revolutions/s
2
and revolutions/s
3
(resp. pitch/s, pitch/s
2
, pitch/s
3
for linear motors).
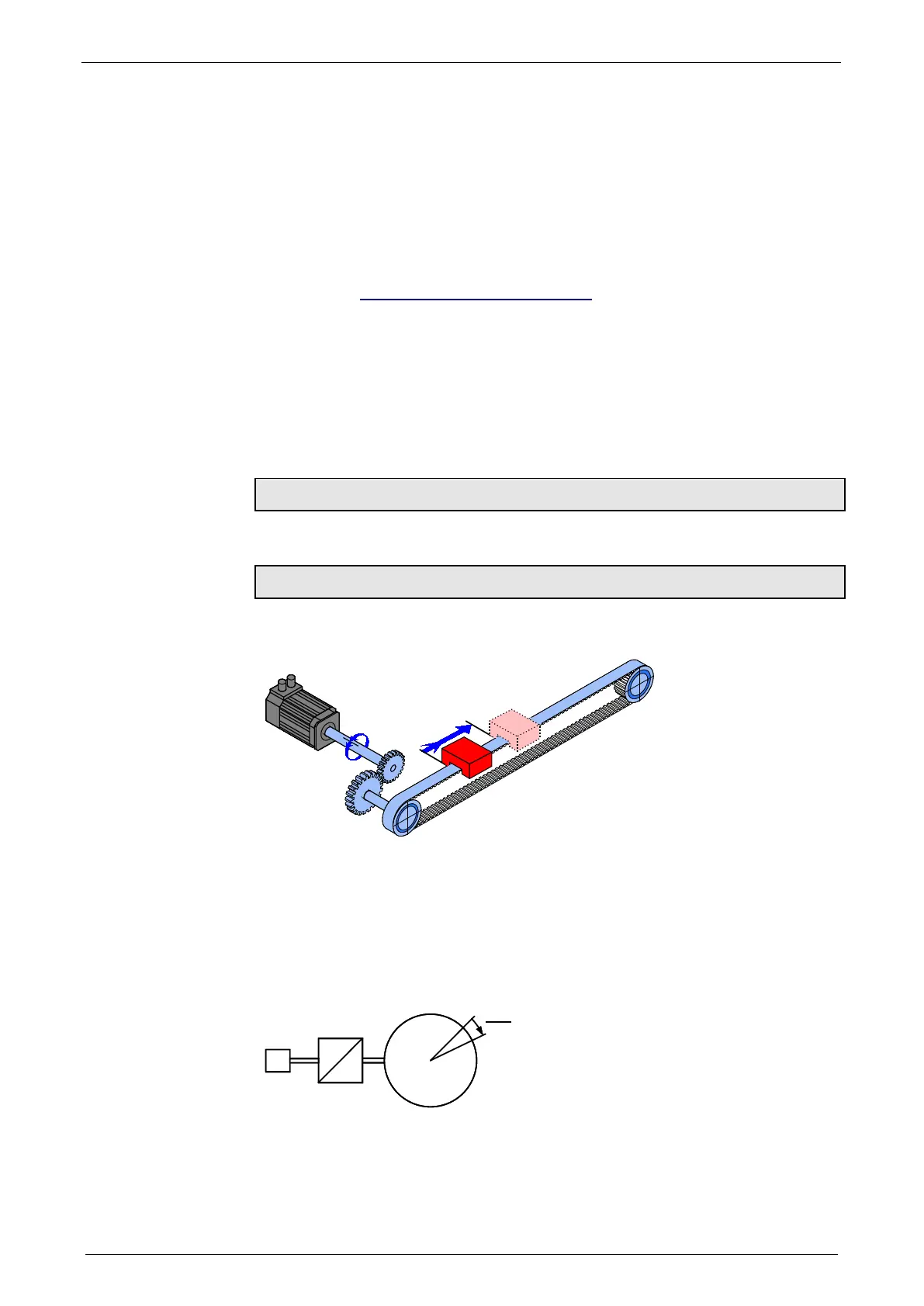
The measure reference to the motor is created with the value:
"travel distance per motor revolution / pitch" in the selected unit.
You can enter the "travel distance per motor revolution" as a fraction (numerator
divided by denominator). This is useful in the case of continuous operation mode or
in reset mode if the value cannot be specified as a rational number. This makes it
possible to avoid long-term drifts.
Rotary table control
motor revolution /
Input as numerator
and denominator