6 Assi
nin
Parameters to the Control and the PLC Pro
ram
6
03.96
6.9 Axes and spindles
6-130
Siemens AG 2000 All Rights Reserved
SINUMERIK 840D Installation and Start-Up Guide (IAD) – 04.00 Edition
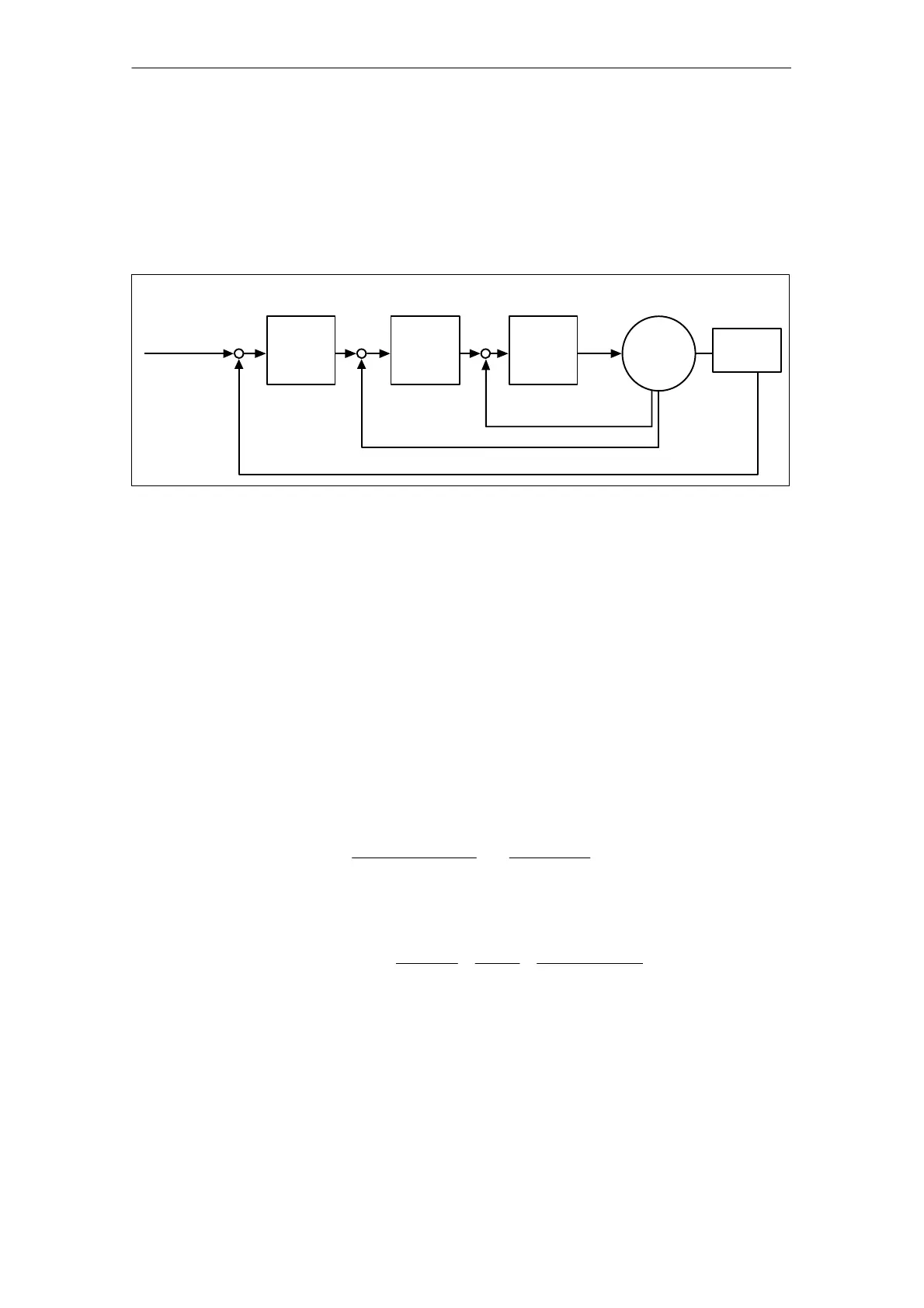
6.9.10 Position controller data (axis)
The closed-loop control of an axis consists of the speed control loop, the current
control loop and a higher level position control loop.
Position
controller
Speed
controller
i
set
n
set
Current
controller
n
act
i
act
Position setpoint
from
interpolator
Motor
Encoder
Actual position
value
Fig. 6-16 Control loops
If the axis does not traverse in the desired direction, then an adjustment can be
made in MD 32100: AX_MOTION_DIR (traversing direction). The value “–1”
reverses the direction of motion. Allowance is made internally for the control
direction of the position controller. If the control direction of the position
measuring system is incorrect, it can be adjusted with MD 32110:
ENC_FEEDBACK_POL (actual value sign).
In order to obtain high contour accuracy with an interpolation, the loop gain (K
V
factor) of the position controller must be large. However, an excessively high K
V
factor causes overshoot, instability and impermissibly high machine loads. The
maximum permissible K
V
factor is dependent on the design and dynamic
response of the drive and the mechanical quality of the machine.
Following error
Velocity
K
V
=
[m/min]
[mm]
The K
V
factor is entered in MD 32200 POSCTRL_GAIN on the basis of the
following conversion formula:
min mm
m
K
V
(s
–1
)
=
[m/min]
[mm]
K
V
*
== K
V
* 16.66667 s
–1
1000 mm 1 min
1 m 60 s
*
For the factor K
V
1 (m/min)/mm, the numerical value must be entered in
MD 32200: POSCTRL_GAIN. Allowance for the factor 16.667 is made by
MD 10220: SCALING_USER_DEF_MASK and
MD 10230: SCALING_FACTORS_USER_DEF.
For continuous path control, all axes included in the interpolation must have the
same dynamic response. They must all have the same following error at a given
velocity.
Control loops
Traversing
direction
Loop gain
Definition of K
V
factor

 Loading...
Loading...



















